Результат интеллектуальной деятельности: ПЕРЕДАЧА ПИЛОТ-СИГНАЛА И ОЦЕНИВАНИЕ КАНАЛА ДЛЯ СИСТЕМ С МНОЖЕСТВОМ ВХОДОВ И ОДНИМ ВЫХОДОМ (MISO) И С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ (MIMO)
Вид РИД
Изобретение
Настоящая заявка на патент испрашивает приоритет предварительной заявки № 60/550,893 на «Оценивание канала с использованием перекрытия пилот-сигналов для MISO/MIMO мультиплексирования» от 5 марта 2004, переуступленной заявителю настоящей заявки и включенной в настоящий документ посредством ссылки.
Область техники
Настоящее изобретение относится к беспроводным системам связи и, более конкретно, к передаче пилот-сигнала и оцениванию канала в беспроводной системе связи с множеством антенн.
Предшествующий уровень техники
Беспроводная система связи с множеством антенн поддерживает (1) передачу от множества (Т) передающих антенн к множеству приемных (R) антенн в режиме с множеством входов и множеством выходов (MIMO) и (2) передачу от множества передающих антенн к одной приемной антенне в режиме с множеством входов и одним выходом (MISO). MIMO-канал, образованный T передающими антеннами и R приемными антеннами, состоит из S пространственных каналов, где S≤min{T,R}. S пространственных каналов могут использоваться для передачи данных параллельно для обеспечения более высокой пропускной способности в целом и/или с избыточностью для обеспечения более высокой надежности. MISO-канал, образованный T передающими антеннами и одной приемной антенной, формирует один пространственный канал. Т передающих антенн могут использоваться для передачи данных с избыточностью для обеспечения более высокой надежности.
Точная оценка беспроводного канала между передатчиком и приемником обычно необходима для восстановления данных, переданных по беспроводному каналу. Оценивание канала в типовом случае выполняется путем передачи пилот-сигнала от передатчика и измерения пилот-сигнала в приемнике. Пилот-сигнал формируется из символов, которые априорно известны в передатчике и приемнике. Приемник может, таким образом, оценивать отклик канала на основе принятых символов и известных символов.
Система с множеством антенн может одновременно поддерживать как MISO-приемники (которые представляют собой приемники, снабженные одной антенной), так и MIMO-приемники (которые представляют собой приемники, снабженные множеством антенн). MISO- и MIMO-приемники в типовом случае требуют различных оценок канала и, таким образом, предъявляют разные требования к пилот-сигналу, как описано ниже. Поскольку передача пилот-сигнала представляет собой непроизводительную нагрузку в системе с множеством антенн, желательно по возможности минимизировать передачу пилот-сигнала. Однако передача пилот-сигнала должна быть такой, чтобы как MISO-, так и MIMO-приемники могли получать оценки канала достаточного качества.
Поэтому в технике существует потребность в способах эффективной передачи пилот-сигнала в системе с множеством антенн.
Сущность изобретения
Предложены способы для передачи пилот-сигнала для поддержки как MISO-, так и MIMO-приемников в системе с множеством антенн и для выполнения оценки канала в этих приемниках. Передатчик генерирует множество составных пилот-сигналов с помощью обучающей матрицы и матрицы усилений. Каждый составной пилот-сигнал содержит множество обучающих пилот-сигналов, которые генерируются посредством множества столбцов обучающей матрицы и далее масштабируются посредством множества элементов усиления в столбце матрицы усилений. Обучающая матрица может быть ортонормированной матрицей с ортогональными столбцами (например, матрицей Уолша или матрицей Фурье) или некоторой другой матрицей. Матрица усиления сформирована таким образом, чтобы MISO- и MIMO-приемники могли оценивать свои соответствующие MISO- и MIMO-каналы. Матрица усилений также управляет величиной мощности передачи, используемой для обучающего пилот-сигнала, посылаемого для MISO-приемника, и обучающих пилот-сигналов, посылаемых для MIMO-приемника. Передатчик передает каждый составной пилот-сигнал от множества (Т) передающих антенн.
MISO-приемник получает принятые символы для множества составных пилот-сигналов через одну приемную антенну и обрабатывает (например, фильтрует) эти принятые символы для получения оценки составного MISO-канала между Т передающими антеннами и одной приемной антенной. Для системы с множеством несущих, MISO-приемник может получить начальную оценку импульсного отклика для каждого составного пилот-сигнала на основе принимаемых символов, полученных из множества частотных поддиапазонов, используемых для данного составного пилот-сигнала. MISO-приемник затем фильтрует начальные оценки импульсного отклика для множества составных пилот-сигналов для получения оценки импульсного отклика для составного MISO-канала. MISO-приемник может выполнять постобработку (например, сравнение с порогом и/или усечение) для этой оценки импульсного отклика и затем выводить окончательную оценку частотного отклика для составного MISO-канала на основе прошедшей постобработку оценки импульсного отклика.
MIMO-приемник получает принятые символы для множества составных пилот-сигналов через множество (R) приемных антенн и обрабатывает эти принятые символы на основе обучающей матрицы и матрицы усилений для получения оценок множества каналов с одним входом и одним выходом (SISO) MIMO-канала между Т передающими антеннами и R приемными антеннами. Для системы с множеством несущих, MIМO-приемник может получить начальную оценку импульсного отклика для каждой комбинации составного пилот-сигнала и приемной антенны на основе принятых символов, полученных из множества частотных поддиапазонов, используемых для данной комбинации составного пилот-сигнала и приемной антенны. MIМO-приемник может затем обрабатывать начальные оценки импульсного отклика для всех комбинаций составного пилот-сигнала и приемной антенны на основе обучающей матрицы и матрицы усилений для получения оценок импульсных откликов для отдельных SISO-каналов. MIМO-приемник может затем выводить окончательную оценку частотного отклика для каждого SISO-канала на основе оценки импульсного отклика для данного SISO-канала.
MISO- и MIМO-приемники могут также выполнять оценивание канала другими способами и/или с использованием других методов оценивания каналов, как описано ниже. Различные аспекты и варианты осуществления изобретения описаны ниже более подробно.
Краткое описание чертежей
Признаки и характеристики настоящего описания поясняются в последующем подробном описании, иллюстрируемом чертежами, на которых одинаковыми ссылочными позициями обозначены соответствующие элементы на разных чертежах.
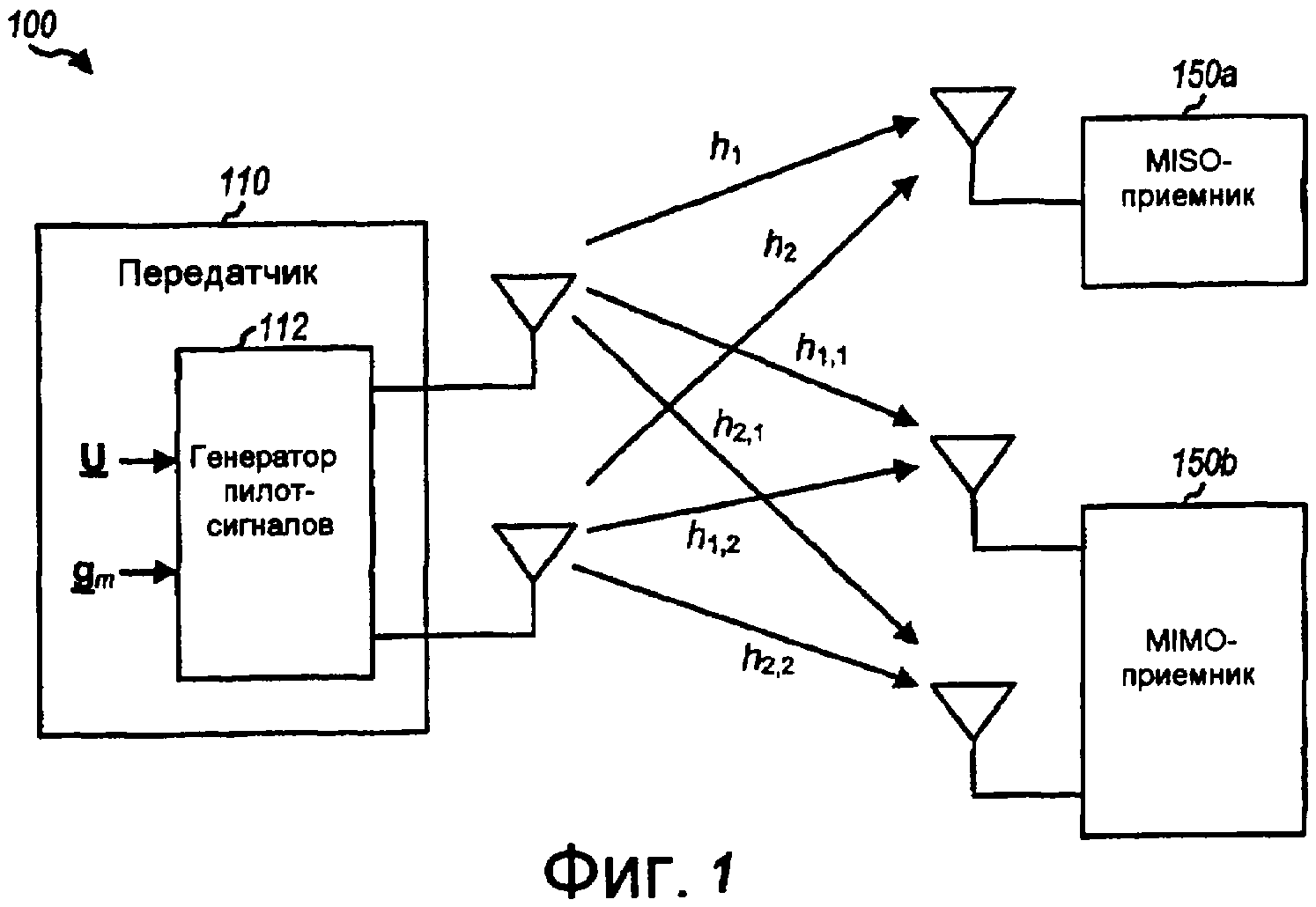
Фиг.1 - система с множеством антенн с передатчиком и двумя приемниками.
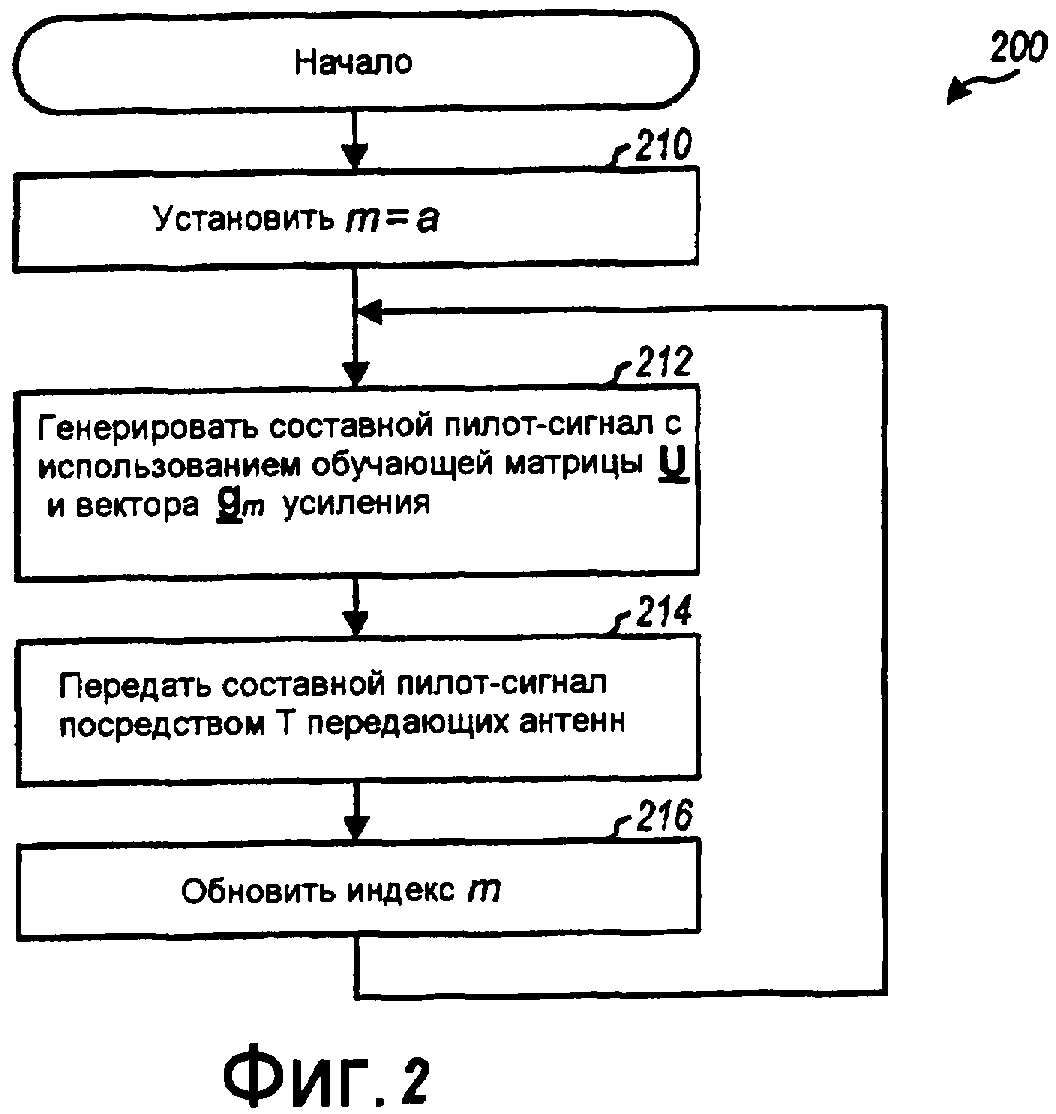
Фиг.2 - процесс передачи пилот-сигнала в системе с множеством антенн.
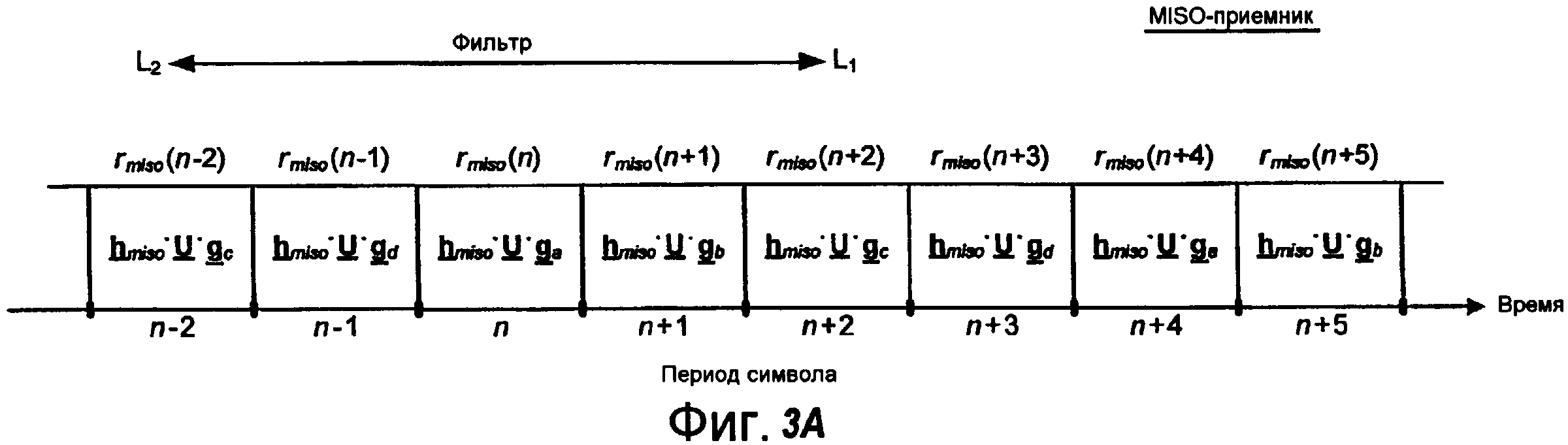
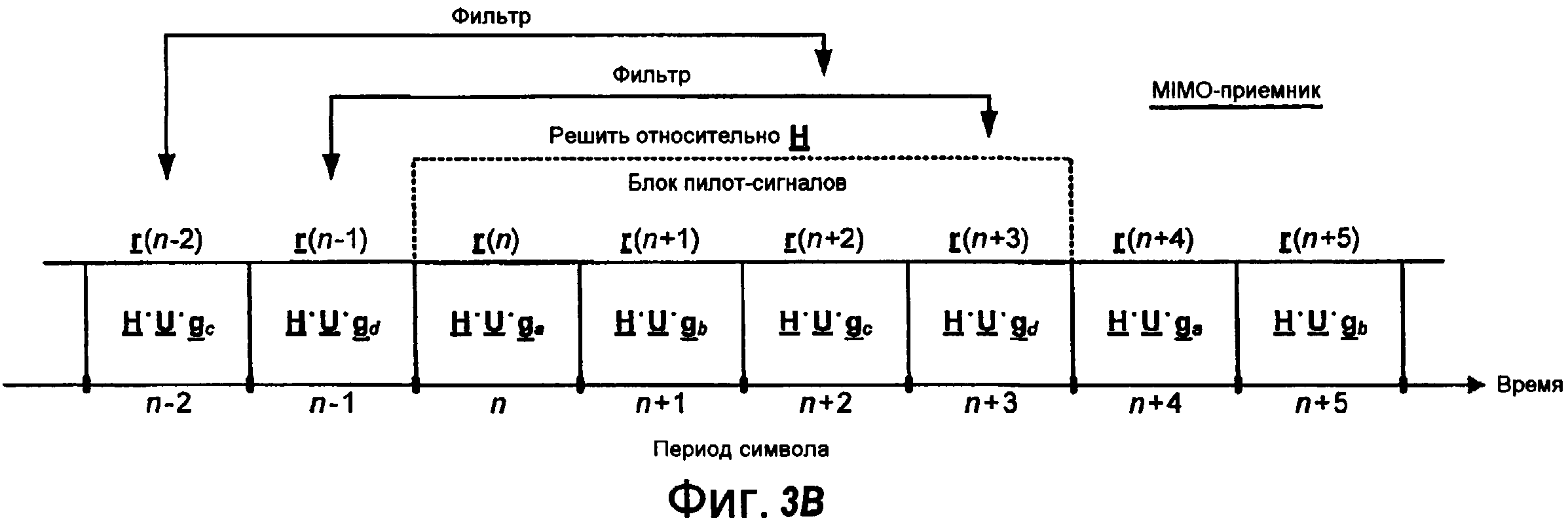
Фиг.3А и 3В - иллюстрации оценивания канала, выполняемого MISO-приемником и MIМO-приемником соответственно для четырех составных пилот-сигналов.
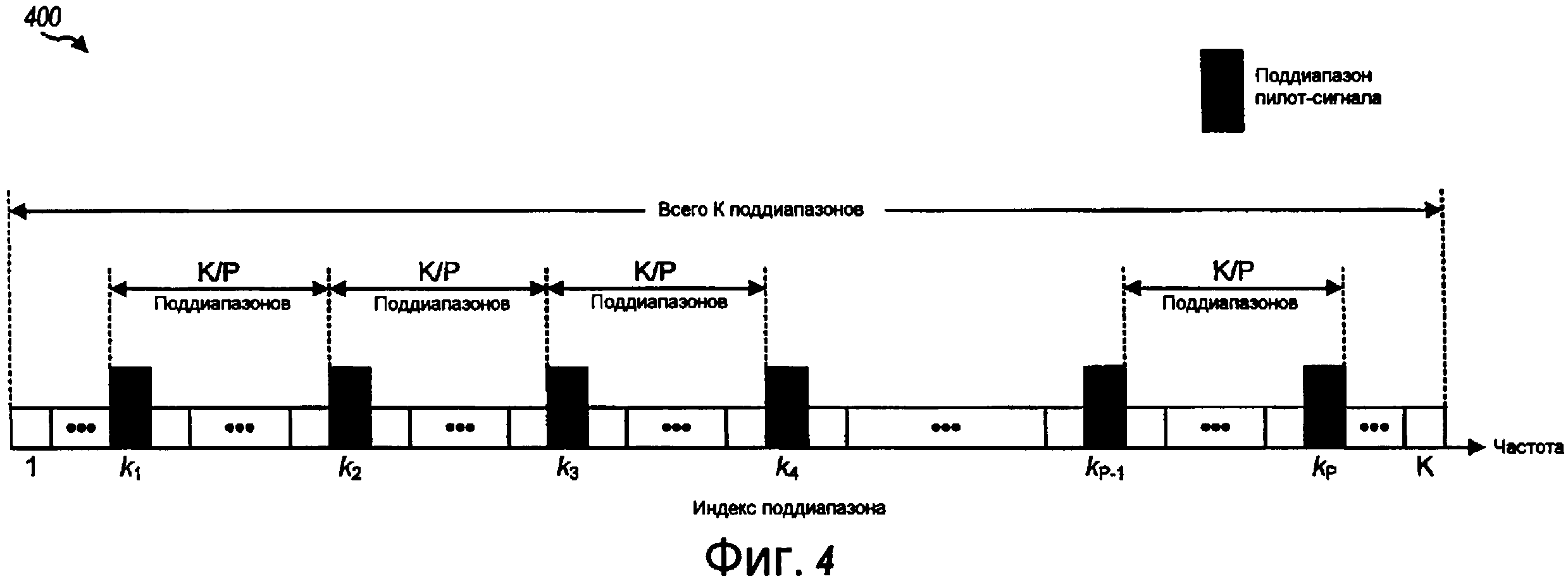
Фиг.4 - структура поддиапазона для системы мультиплексирования с ортогональным частотным разнесением (OFDM) с множеством антенн.
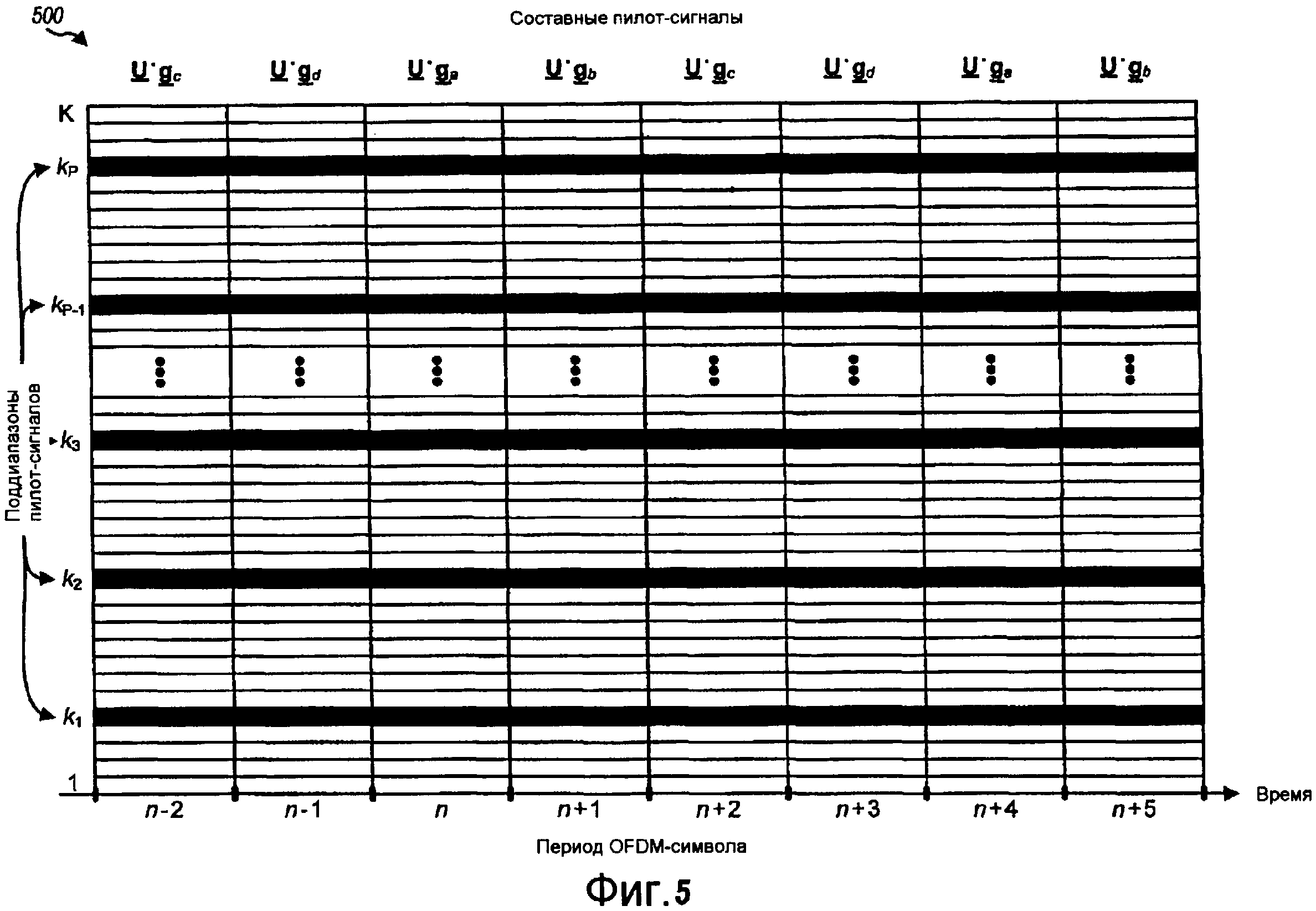
Фиг.5 - примерная схема передачи пилот-сигнала.
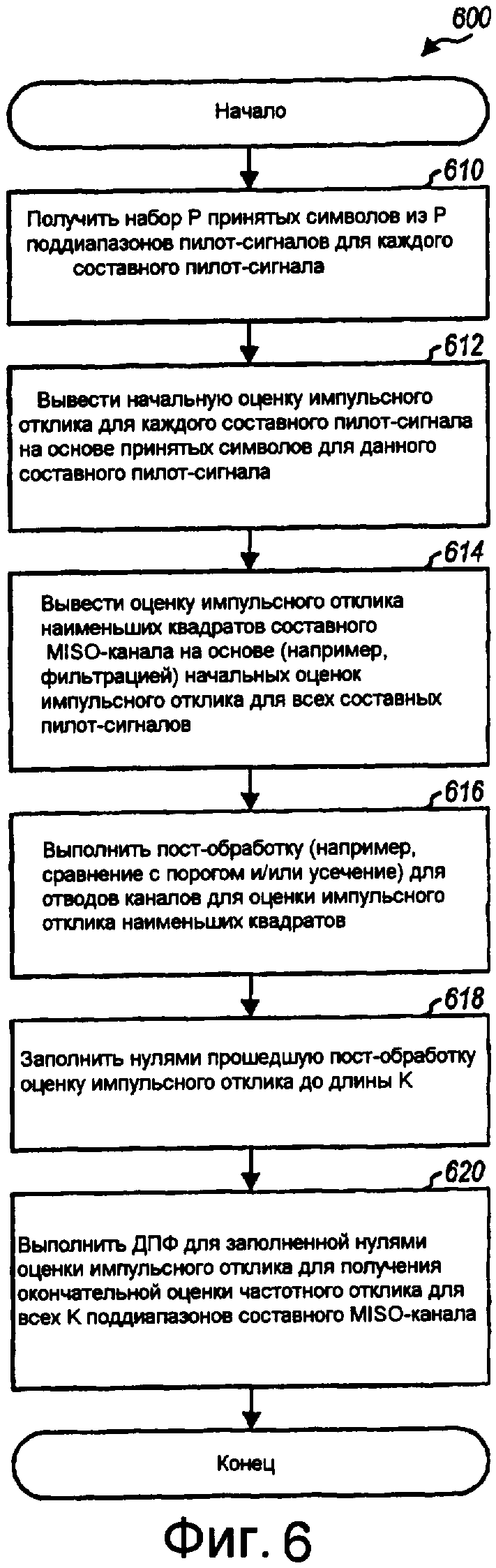
Фиг.6 - процесс оценивания канала для MISO-приемника.
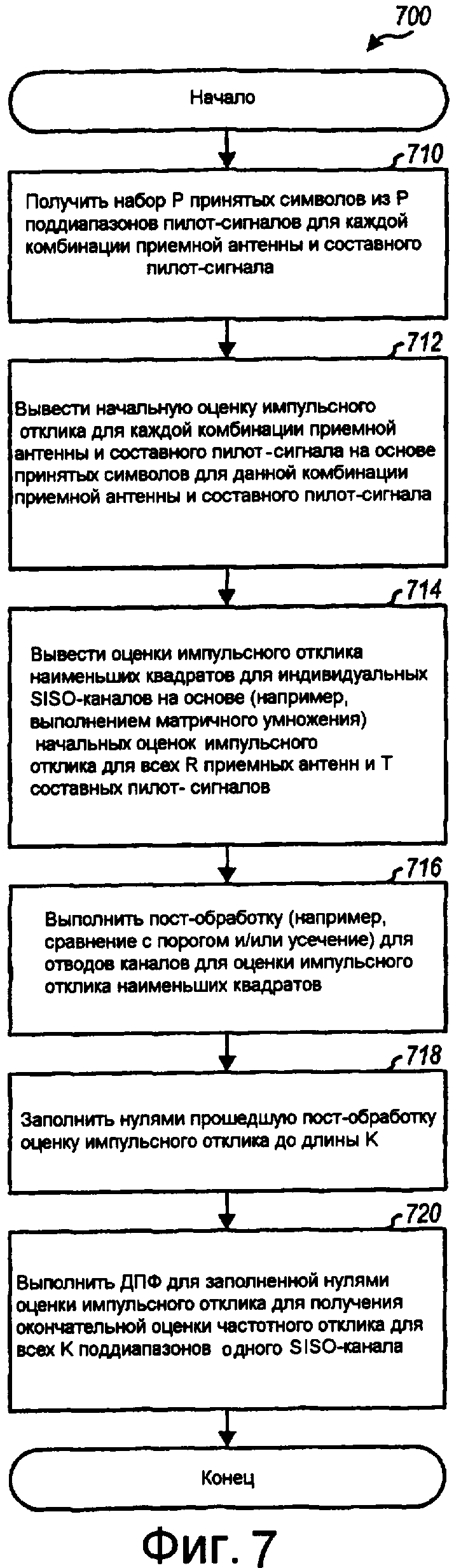
Фиг.7 - процесс оценивания канала для MIМO-приемника.
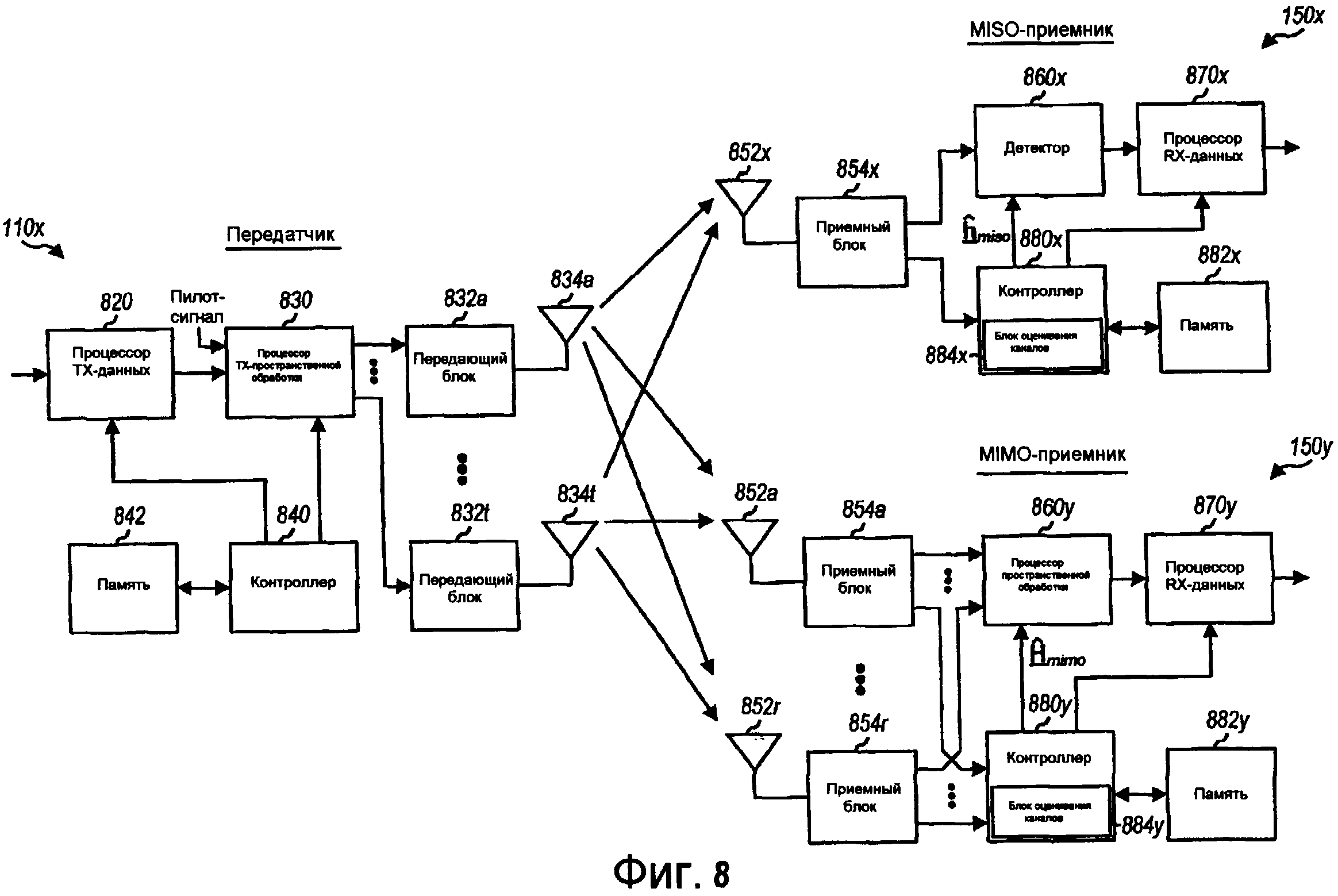
Фиг.8 - блок-схема передатчика, MISO-приемника и MIМO-приемника.
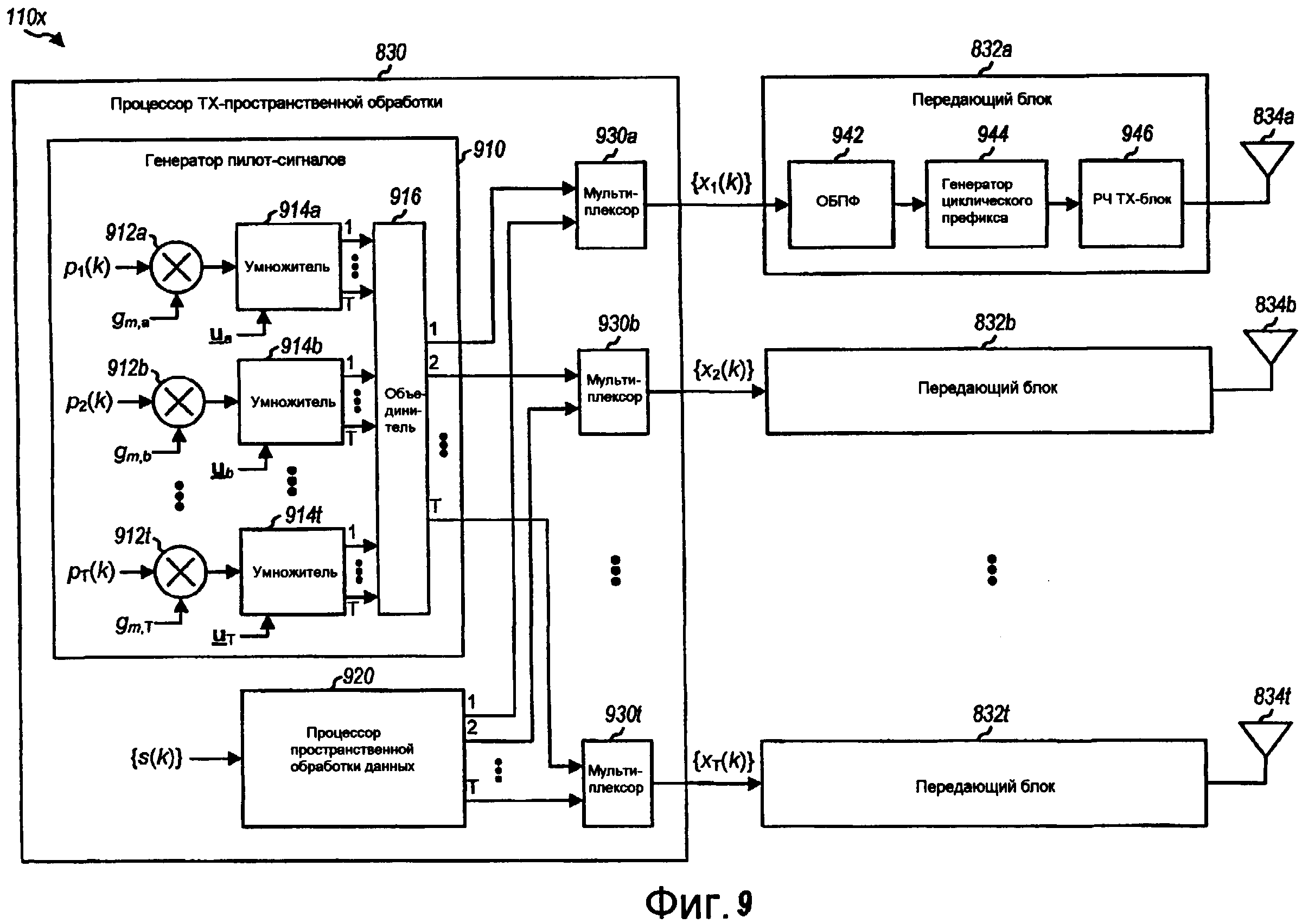
Фиг.9 - блок-схема процессора пространственной обработки передачи (ТХ) и передающего блока в передатчике.
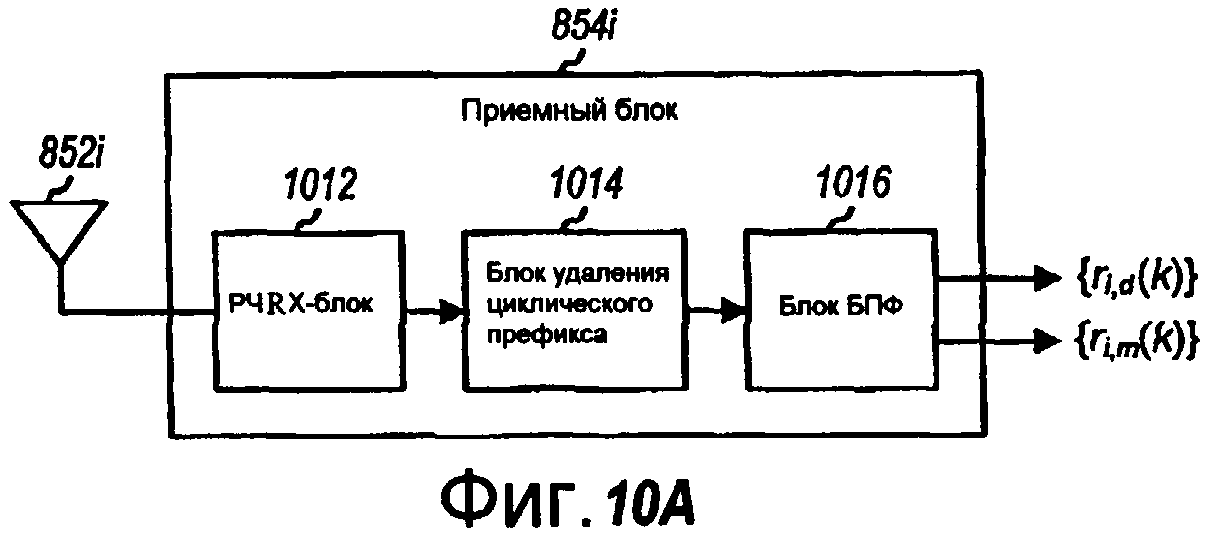
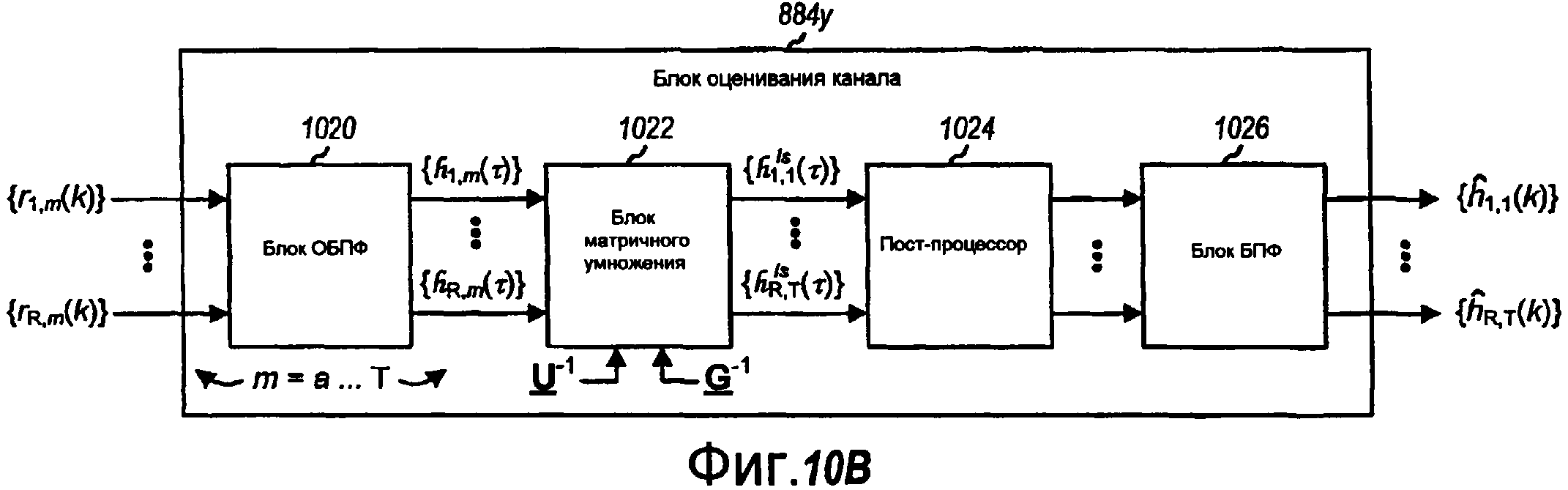
Фиг.10А и 10В - блок-схемы приемного блока и блока оценивания канала соответственно для MIМO-приемника.
Детальное описание
Термин «примерный» используется в настоящем описании в смысле «служащий в качестве примера, экземпляра или иллюстрации». Любой вариант осуществления, описанный как примерный, необязательно должен толковаться как предпочтительный или преимущественный по отношению к другим вариантам осуществления или структурам.
1. Система с множеством антенн с одной несущей
На фиг.1 представлена система 100 связи с одной антенной, содержащая передатчик 110 и два приемника 150а и 150b. Для простоты передатчик 110 имеет две передающие антенны, MISO-приемник 150а имеет одну приемную антенну, и MIМO-приемник 150b имеет две приемные антенны.
MISO-канал, образованный двумя антеннами в передатчике и одной антенной в MISO-приемнике, может характеризоваться 1х2-вектором-строкой  отклика канала. Этот вектор может быть выражен следующим образом:
отклика канала. Этот вектор может быть выражен следующим образом:
 (1)
(1)
здесь hj для j=1,2 обозначает комплексное усиление канала между передающей антенной j и одной антенной в MISO-приемнике. Вектор часто выражается как столбец, а вектор-строка выражается как строка. SISO-канал существует между каждой парой передающей/приемной антенн. Два элемента записи в указывают на усиления канала для двух SISO-каналов одного MISO-канала.
MIМO-канал, формируемый двумя антеннами в передатчике и двумя антеннами в MIМO-приемнике, может быть охарактеризован 2х2-матрицей  отклика канала. Матрица может быть выражена следующим образом:
отклика канала. Матрица может быть выражена следующим образом:
 (2)
(2)
здесь hi,j для i=1,2 и j=1,2 обозначает комплексное усиление канала между передающей антенной j и приемной антенной i в MIMO-приемнике. Матрица может также рассматриваться как содержащая один вектор-строку  отклика канала для каждой приемной антенны i.
отклика канала для каждой приемной антенны i.
Передатчик передает пилот-сигнал от двух передающих антенн, обеспечивая возможность MISO-приемнику и MIMO-приемнику оценивать их соответствующие MISO-канал и MIМO-канал. Генератор 112 пилот-сигналов в передатчике может генерировать составной пилот-сигнал следующим образом:
 (3)
(3)
где  - 2х1 - вектор усиления для составного пилот-сигнала m;
- 2х1 - вектор усиления для составного пилот-сигнала m;
 - обучающая 2х2 - матрица с двумя столбцами и
- обучающая 2х2 - матрица с двумя столбцами и
 - 2х1 - вектор с двумя символами передачи для составного пилот-сигнала m.
- 2х1 - вектор с двумя символами передачи для составного пилот-сигнала m.
Для простоты, символы модуляции 1+j0 используются для пилот-сигнала и могут, таким образом, быть опущены в уравнении (3). Символ передачи является символом, который передается от одной антенны в одном периоде символа пилот-сигнала. Период символа относится к интервалу времени, в котором символ передачи посылается от антенны.
Обучающая матрица содержит два вектора или столбца, которые должны быть ортогональны друг другу, и определяется следующим образом: =  . Каждый вектор
. Каждый вектор  для m=a,b называется обучающим вектором и используется для генерации обучающего пилот-сигнала, который направлен в конкретном пространственном направлении, определяемом элементами . Составной пилот-сигнал включает в себя два обучающих пилот-сигнала, которые генерируются с помощью двух обучающих векторов
для m=a,b называется обучающим вектором и используется для генерации обучающего пилот-сигнала, который направлен в конкретном пространственном направлении, определяемом элементами . Составной пилот-сигнал включает в себя два обучающих пилот-сигнала, которые генерируются с помощью двух обучающих векторов  и
и  . Вектор
. Вектор  усиления содержит два элемента, которые определяют усиления двух обучающих пилот-сигналов. Два обучающих пилот-сигнала для составного пилот-сигнала, таким образом, масштабируются, объединяются и передаются одновременно двумя передающими антеннами.
усиления содержит два элемента, которые определяют усиления двух обучающих пилот-сигналов. Два обучающих пилот-сигнала для составного пилот-сигнала, таким образом, масштабируются, объединяются и передаются одновременно двумя передающими антеннами.
Передатчик генерирует два составных пилот-сигнала с помощью двух разных векторов  и
и  усиления. Передатчик передает два составных пилот-сигнала (например, в двух периодах символов), обеспечивая возможность MISO-приемнику и MIMO-приемнику оценивать их соответствующие каналы. В качестве примера, обучающая матрица и вектора и усиления могут быть определены следующим образом:
усиления. Передатчик передает два составных пилот-сигнала (например, в двух периодах символов), обеспечивая возможность MISO-приемнику и MIMO-приемнику оценивать их соответствующие каналы. В качестве примера, обучающая матрица и вектора и усиления могут быть определены следующим образом:
 (4)
(4)
где α определяет долю передаваемой мощности для использования для дополнительного пилот-сигнала в MIMO-приемнике и в типовом случае выбирается так, что 1≥α≥0.
Принятый символ в MISO-приемнике для каждого составного пилот-сигнала может быть выражен следующим образом:
 (5)
(5)
где r1x1,m - принятый символ в MISO-приемнике для составного пилот-сигнала m; и
n1x1,m - шум в MISO-приемнике для составного пилот-сигнала m.
Два принятых символа в MISO-приемнике для двух составных пилот-сигналов могут быть представлены в развернутой форме следующим образом:
 (6)
(6)
В уравнении (6) предполагается, что MISO-канал является постоянным на двух периодах символов, в которых переданы два составных пилот-сигнала.
Передатчик обычно передает данные с избыточностью от обеих передающих антенн в MISO-приемник. В этом случае MISO-приемнику необходимо только оценить составной MISO-канал, который соответствует hcomp=h1+h2, и не требуется оценивать усиления h1 и h2 каналов для индивидуальных SISO-каналов MISO-канала. MISO-приемник может получать оценку составного MISO-канала следующим образом:
 (7)
(7)
где  является оценкой hcomp.
является оценкой hcomp.
Принятые символы в MIМO-приемнике для каждого составного пилот-сигнала могут быть выражены следующим образом:
 (8)
(8)
где  - 2х1 - вектор принятых символов для составного пилот-сигнала m, где «Т» обозначает транспонирование и
- 2х1 - вектор принятых символов для составного пилот-сигнала m, где «Т» обозначает транспонирование и
 - вектор шума в MIМO-приемнике для составного пилот-сигнала m.
- вектор шума в MIМO-приемнике для составного пилот-сигнала m.
MIМO-приемник получает два вектора принятых символов и
и  для двух составных пилот-сигналов, генерируемых с помощью двух векторов
для двух составных пилот-сигналов, генерируемых с помощью двух векторов  и
и  усилений соответственно.
усилений соответственно.
Четыре принятых символа в MIМO-приемнике для двух составных пилот-сигналов могут быть выражены в развернутой форме следующим образом:
 (9)
(9)
В уравнении (9) предполагается, что MIМO-канал является постоянным на двух периодах символов, в которых передаются два составных пилот-сигнала.
Передатчик может передавать данные параллельно от обеих передающих антенн к MIМO-приемнику для улучшения пропускной способности. В этом случае MIМO-приемнику обычно требуется (1) оценить усиления h1,1, h1,2, h2,1 и h2,2 канала для индивидуальных SISO-каналов MIMO-канала и (2) использовать эти оценки усилений каналов для восстановления передачи данных от передатчика. MIМO-приемник может вывести оценку индивидуальных SISO-каналов следующим образом:
 (10)
(10)
где n1,1, n1,2, n2,1 и n2,2 - шумы, наблюдаемые оценками усилений каналов, соответственно,  .
.
Приведенное выше описание относится к системе 2х2, в которой передатчик имеет две передающие антенны и приемники имеют максимум две приемные антенны. В общем случае, система с множеством антенн может содержать передатчики и приемники с любым числом антенн, так что Т и R могут быть любыми целыми числами.
В случае системы RхТ, передатчик генерирует Т составных пилот-сигналов с Т векторами усилений, по одному вектору для каждого составного пилот-сигнала. Каждый составной пилот-сигнал может генерироваться следующим образом:
 (11)
(11)
где  - Тх1-вектор усиления для составного пилот-сигнала m;
- Тх1-вектор усиления для составного пилот-сигнала m;
 - обучающая ТхТ-матрица с Т столбцами, и
- обучающая ТхТ-матрица с Т столбцами, и
 - Тх1 - вектор с Т обучающими символами для составного пилот-сигнала m.
- Тх1 - вектор с Т обучающими символами для составного пилот-сигнала m.
Матрица содержит Т (предпочтительно ортогональных) обучающих векторов и определяется как = . Каждый обучающий вектор содержит Т элементов для Т передающих антенн и указывает в определенном пространственном направлении. Каждый составной пилот-сигнал содержит Т обучающих пилот-сигналов, которые генерируются с помощью Т обучающих векторов в . Т обучающих пилот-сигналов для каждого составного пилот-сигнала масштабируются с помощью Т элементов усиления в векторе усиления и затем суммируются вместе. Т различных векторов усиления используются для Т составных пилот-сигналов и определяются как
. Каждый обучающий вектор содержит Т элементов для Т передающих антенн и указывает в определенном пространственном направлении. Каждый составной пилот-сигнал содержит Т обучающих пилот-сигналов, которые генерируются с помощью Т обучающих векторов в . Т обучающих пилот-сигналов для каждого составного пилот-сигнала масштабируются с помощью Т элементов усиления в векторе усиления и затем суммируются вместе. Т различных векторов усиления используются для Т составных пилот-сигналов и определяются как  . Вектора усиления соответствующим образом выбираются для облегчения оценивания канала как MISO-приемником, так и MIMO-приемником. Передатчик передает Т составных пилот-сигналов, например, в Т периодах символов.
. Вектора усиления соответствующим образом выбираются для облегчения оценивания канала как MISO-приемником, так и MIMO-приемником. Передатчик передает Т составных пилот-сигналов, например, в Т периодах символов.
MISO-приемник получает Т принятых символов для Т составных пилот-сигналов, что может быть выражено следующим образом:
 (12)
(12)
где  - 1хТ - вектор-строка с Т принятыми символами для Т составных пилот-сигналов;
- 1хТ - вектор-строка с Т принятыми символами для Т составных пилот-сигналов;
 - 1хТ - вектор-строка отклика канала для MISO-приемника; и
- 1хТ - вектор-строка отклика канала для MISO-приемника; и
 - 1хТ - вектор-строка шума в MISO-приемнике для Т составных пилот-сигналов.
- 1хТ - вектор-строка шума в MISO-приемнике для Т составных пилот-сигналов.
Вектор-строка принятых символов определяется как  , где
, где  для m=a … T представляет принятый символ для составного пилот-сигнала m.
для m=a … T представляет принятый символ для составного пилот-сигнала m.
MISO-приемнику в типовом случае необходимо только оценивать составной MISO-канал, который соответствует hmiso=h1+h2+…+hT, а не индивидуальные SISO-каналы MISO-канала. Если Т векторов усиления соответствующим образом выбраны, то MISO-приемник может получать оценку составного MISO-канала просто фильтрацией (например, усреднением) Т принятых символов для Т составных пилот-сигналов следующим образом:
 (13)
(13)
где  - оценка
- оценка  и
и  - шум, наблюдаемый
- шум, наблюдаемый  . MISO-приемник может также получать составную оценку MISO-канала путем фильтрации принятых символов с помощью других фильтров, имеющих другие коэффициенты, как описано ниже.
. MISO-приемник может также получать составную оценку MISO-канала путем фильтрации принятых символов с помощью других фильтров, имеющих другие коэффициенты, как описано ниже.
MIМO-приемник получает Т векторов принятых символов для Т составных пилот-сигналов, что может быть выражено следующим образом:
 (14)
(14)
где  - RxT- матрица с Т векторами принятых символов для Т составных пилот-сигналов;
- RxT- матрица с Т векторами принятых символов для Т составных пилот-сигналов;
 - RxT- матрица отклика канала для MIМO-приемника, и
- RxT- матрица отклика канала для MIМO-приемника, и
 - RxT- матрица шума в MIМO-приемнике для Т составных пилот-сигналов.
- RxT- матрица шума в MIМO-приемнике для Т составных пилот-сигналов.
Матрица принятых символов определяется как  , где
, где  для m=a … T является вектором с R принятыми символами, принятыми посредством R приемных антенн для составного пилот-сигнала m.
для m=a … T является вектором с R принятыми символами, принятыми посредством R приемных антенн для составного пилот-сигнала m.
MIМO-приемник может получить оценку матрицы отклика MIМO-канала в следующем виде:
 (15)
(15)
где  - оценка , и
- оценка , и  - шумы, наблюдаемые матрицей . Матрица оценки отклика канала может также быть получена путем выполнения некоторой другой линейной операции над матрицей принятых символов.
- шумы, наблюдаемые матрицей . Матрица оценки отклика канала может также быть получена путем выполнения некоторой другой линейной операции над матрицей принятых символов.
Обучающая матрица определяется как обеспечивающая удовлетворительную эффективность оценивания канала как для MISO, так и для MIMO-приемников. Обучающий пилот-сигнал, генерируемый с использованием первого обучающего вектора  в , может рассматриваться как MISO-пилот-сигнал, посланный для MISO-приемника. Остальные Т-1 обучающих пилот-сигналов, генерируемых с помощью остальных Т-1 векторов от
в , может рассматриваться как MISO-пилот-сигнал, посланный для MISO-приемника. Остальные Т-1 обучающих пилот-сигналов, генерируемых с помощью остальных Т-1 векторов от  по
по  , могут рассматриваться как дополнительный пилот-сигнал, посланный для MIMO-приемника. MISO-пилот-сигнал может рассматриваться как более важный, например, если передатчик поддерживает множество MISO-приемников. Дополнительный пилот-сигнал для MIMO-приемника может рассматриваться как менее важный и не должен ухудшать эффективность оценивания канала MISO-приемников. Использование обучающей матрицы и матрицы
, могут рассматриваться как дополнительный пилот-сигнал, посланный для MIMO-приемника. MISO-пилот-сигнал может рассматриваться как более важный, например, если передатчик поддерживает множество MISO-приемников. Дополнительный пилот-сигнал для MIMO-приемника может рассматриваться как менее важный и не должен ухудшать эффективность оценивания канала MISO-приемников. Использование обучающей матрицы и матрицы  усиления обеспечивает для передачи пилот-сигнала одно предпочтительное пространственное направление для MISO-приемника, в то же время при поддержке MIMO-приемника.
усиления обеспечивает для передачи пилот-сигнала одно предпочтительное пространственное направление для MISO-приемника, в то же время при поддержке MIMO-приемника.
Наивысшая эффективность для оценивания канала может быть достигнута, если является ортонормированной матрицей, и Т обучающих векторов в являются ортогональными друг другу и имеют единичную мощность. Ортонормированное условие может быть выражено как  , где
, где  - единичная матрица, и «Н» обозначает сопряженное транспонирование. Ортонормированное условие может эквивалентным образом выражаться как
- единичная матрица, и «Н» обозначает сопряженное транспонирование. Ортонормированное условие может эквивалентным образом выражаться как  для m=a…T и
для m=a…T и  для l=a…T, m=a…T и l≠m. Ортогональные обучающие вектора позволяют MISO-приемнику усреднять дополнительный пилот-сигнал, посланный для MIMO-приемника, так что оценка MISO-канала в минимальной степени ухудшается за счет дополнительного пилот-сигнала. Т обучающих векторов в , указывающих в различных пространственных направлениях, позволяют MIMO-приемнику оценивать усиления каналов для индивидуальных SISO-каналов MIMO-канала или R·T элементы матрицы оценки канала. Обучающая матрица может быть сформирована различными способами.
для l=a…T, m=a…T и l≠m. Ортогональные обучающие вектора позволяют MISO-приемнику усреднять дополнительный пилот-сигнал, посланный для MIMO-приемника, так что оценка MISO-канала в минимальной степени ухудшается за счет дополнительного пилот-сигнала. Т обучающих векторов в , указывающих в различных пространственных направлениях, позволяют MIMO-приемнику оценивать усиления каналов для индивидуальных SISO-каналов MIMO-канала или R·T элементы матрицы оценки канала. Обучающая матрица может быть сформирована различными способами.
В одном варианте осуществления обучающая матрица представляет собой матрицу Уолша  . 2х2-матрица Уолша
. 2х2-матрица Уолша  эквивалентна матрице
эквивалентна матрице  в уравнении (4). Матрица Уолша большего размера, такая как
в уравнении (4). Матрица Уолша большего размера, такая как  , может быть сформирована из матрицы Уолша меньшего размера, такой как
, может быть сформирована из матрицы Уолша меньшего размера, такой как  , следующим образом:
, следующим образом:
 (16)
(16)
Матрицы Уолша имеют квадратные размеры, выраженные как степень двух.
В другом варианте осуществления обучающая матрица представляет собой матрицу Фурье  . Матрица Фурье размера ТхТ имеет элемент fl,n в l-й строке и n-м столбце, который может быть выражен следующим образом:
. Матрица Фурье размера ТхТ имеет элемент fl,n в l-й строке и n-м столбце, который может быть выражен следующим образом:
 (17)
(17)
Выражения “l-1” и “n-1” (вместо просто “l” и “n”) в экспоненте в формуле (17) обусловлены схемой индексации, которая начинается с 1 вместо 0. Могут быть сформированы матрицы Фурье любого квадратного размера (например, 2х2, 3х3, 4х4 и т.д.).
Каждый составной пилот-сигнал содержит Т обучающих пилот-сигналов, которые генерируются с использованием Т обучающих векторов в матрице . Вектор усиления для каждого составного пилот-сигнала определяет долю передаваемой мощности, предназначенной для использования для MISO-пилот-сигнала и дополнительного пилот-сигнала. Т векторов усиления для Т составных пилот-сигналов выбираются таким образом, чтобы (1) MISO-приемник мог оценивать отклик составного MISO-канала при минимальном ухудшении, связанном с дополнительным пилот-сигналом, и (2) MIMO-приемник мог оценивать индивидуальные SISO-каналы. В одном варианте осуществления матрица усиления формируется путем умножения последних Т-1 строк ортонормированной матрицы на усиление α. Это усиление α определяет долю передаваемой мощности, предназначенной для использования для дополнительного пилот-сигнала для MIMO-приемника. В другом варианте осуществления матрица усиления формируется как диагональная матрица с Т ненулевыми элементами на диагонали и остальными нулевыми элементами. Т диагональных элементов матрицы могут быть выбраны, например, как {1, α, α,…α}. Эта диагональная матрица усиления приводит к получению Т обучающих пилот-сигналов, которые передаются по отдельности, причем первый обучающий пилот-сигнал передается с единичной мощностью, а каждый остальной обучающий пилот-сигнал передается с мощностью α2. В общем случае, матрица усиления определяется таким образом, чтобы MISO-приемник мог получить оценку составного MISO-канала, и MIMO-приемник мог вывести оценки индивидуальных SISO-каналов. Различные матрицы усиления приводят в результате к различным характеристикам пилот-сигналов и, следовательно, к различной эффективности оценивания канала.
Фиг.2 показывает процесс 200 для передачи пилот-сигнала для MISO-приемника и MIMO-приемника в системе с множеством антенн. Первоначально, индекс m устанавливается на первое значение α для этого индекса (блок 210). Передатчик генерирует составной пилот-сигнал m с обучающей матрицей и вектором усиления, например, как представлено в уравнении (11) (блок 212). Затем передатчик передает составной пилот-сигнал m от Т передающих антенн, например, в одном периоде символа (блок 214). Затем индекс m обновляется, например, устанавливается на следующее значение в наборе {a, b,… T} или устанавливается на первое значение α после достижения последнего значения в этом наборе (блок 216). Затем процесс возвращается к блоку 212 для генерации и передачи другого составного пилот-сигнала.
В качестве примера для Rx4-системы с четырьмя передающими антеннами обучающая матрица  и матрица
и матрица  усиления могут быть выражены следующим образом:
усиления могут быть выражены следующим образом:
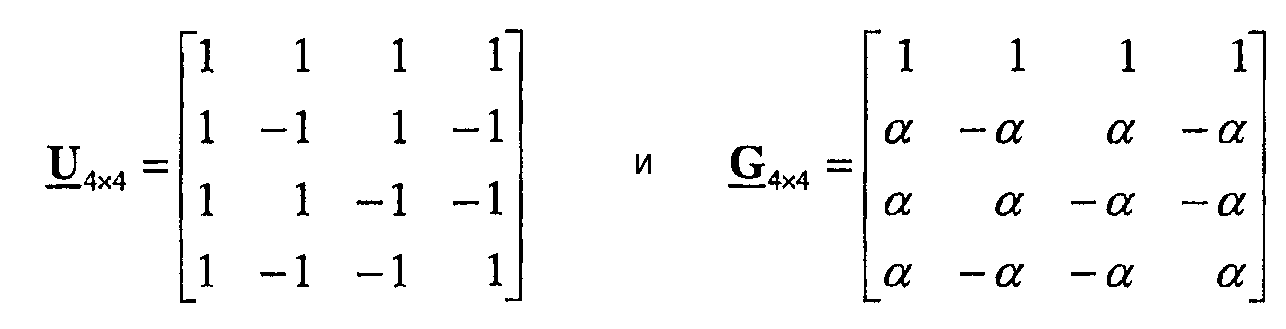 (18)
(18)
Матрица представляет собой 4х4-матрицу Уолша и содержит 4 обучающих вектора или  . Матрица сформирована на основе 4х4-матрицы Уолша и содержит 4 вектора усиления или
. Матрица сформирована на основе 4х4-матрицы Уолша и содержит 4 вектора усиления или  .
.
Передатчик может проходить цикл для четырех векторов усиления в матрице и передавать четыре составных пилот-сигнала в четырех периодах символов. Например, передатчик может передавать первый составной пилот-сигнал, генерируемый с усилением  в периоде символа n, затем второй составной пилот-сигнал, генерируемый с усилением
в периоде символа n, затем второй составной пилот-сигнал, генерируемый с усилением  в периоде символа n+1, затем третий составной пилот-сигнал, генерируемый с усилением
в периоде символа n+1, затем третий составной пилот-сигнал, генерируемый с усилением  в периоде символа n+2, затем четвертый составной пилот-сигнал, генерируемый с усилением
в периоде символа n+2, затем четвертый составной пилот-сигнал, генерируемый с усилением  в периоде символа n+3, затем первый составной пилот-сигнал в периоде символа n+4, и т.д.
в периоде символа n+3, затем первый составной пилот-сигнал в периоде символа n+4, и т.д.
Фиг.3А иллюстрирует оценивание канала MISO-приемником в Rx4-системе. Передатчик передает пилот-сигнал с использованием обучающей матрицы и путем прохождения цикла с использованием четырех векторов усиления в матрице , как описано выше. Принятые символы для MISO-приемника имеют вид:  для периода n символа,
для периода n символа,  для периода n+1 символа, и т.д., как показано на фиг. 3А, где нижний индекс “4x4” для матрицы опущен для ясности. MISO-приемник может фильтровать принятые символы с использованием, например, фильтра с конечным импульсным откликом (КИО), для получения оценки составного MISO-канала в периоде n символа следующим образом:
для периода n+1 символа, и т.д., как показано на фиг. 3А, где нижний индекс “4x4” для матрицы опущен для ясности. MISO-приемник может фильтровать принятые символы с использованием, например, фильтра с конечным импульсным откликом (КИО), для получения оценки составного MISO-канала в периоде n символа следующим образом:
 (19)
(19)
где c(i) для i=-L1…L2 - коэффициенты для КИО-фильтра, и
L1 и L2 - временная протяженность для КИО-фильтра.
Для каузального КИО-фильтра L1=0, L2≥1, и оценка составного MISO-канала является взвешенной суммой принятых символов для L2 предыдущих периодов символов и текущего периода символа. Для некаузального КИО-фильтра L1≥1, L2≥1, и оценка составного MISO-канала является взвешенной суммой принятых символов для L2 предыдущих периодов символов, текущего периода символа и L1 будущих периодов символов. L1 принятых символов буферизуются для реализации некаузального КИО-фильтра.
Фиг.3В иллюстрирует оценивание канала MIМO-приемником в Rx4-системе. Передатчик передает пилот-сигнал с использованием обучающей матрицы и матрицы усиления, как описано выше. Принятые символы для MIМO-приемника имеют вид:  для периода n символа,
для периода n символа,  для периода n+1 символа, и т.д., как показано на фиг.3В. Блок пилот-сигнала представляет собой наименьший интервал, на котором передаются все Т составных пилот-сигнала. Для примера, показанного на фиг.3В, блок пилот-сигнала представляет собой четыре периода символа. MIMO-приемник может фильтровать принятые символы для одного и того же составного пилот-сигнала, например, фильтровать
для периода n+1 символа, и т.д., как показано на фиг.3В. Блок пилот-сигнала представляет собой наименьший интервал, на котором передаются все Т составных пилот-сигнала. Для примера, показанного на фиг.3В, блок пилот-сигнала представляет собой четыре периода символа. MIMO-приемник может фильтровать принятые символы для одного и того же составного пилот-сигнала, например, фильтровать  и
и  для составного пилот-сигнала, генерируемого с использованием
для составного пилот-сигнала, генерируемого с использованием  , фильтровать
, фильтровать  и
и  для составного пилот-сигнала, генерируемого с использованием
для составного пилот-сигнала, генерируемого с использованием  , и т.д. MIMO-приемник может также получать оценки усиления индивидуальных SISO-каналов на основе (отфильтрованных или нефильтрованных) принятых символов, полученных для одного блока пилот-сигналов, как показано на фиг.3В. Например, матрица может быть сформирована с использованием четырех векторов с
, и т.д. MIMO-приемник может также получать оценки усиления индивидуальных SISO-каналов на основе (отфильтрованных или нефильтрованных) принятых символов, полученных для одного блока пилот-сигналов, как показано на фиг.3В. Например, матрица может быть сформирована с использованием четырех векторов с  по принятых символов, и оценки усилений каналов могут быть вычислены на основе матрицы , как показано в уравнении (15).
по принятых символов, и оценки усилений каналов могут быть вычислены на основе матрицы , как показано в уравнении (15).
Для простоты, фиг.3А и 3В показывают MISO- и MIMO-каналы как статические в течение всего интервала времени на периодах символов от n-2 до n+5. Для обеспечения улучшенной эффективности оценивания канала блок пилот-сигналов должен быть короче, чем время когерентности MISO- и MIMO-каналов. Время когерентности представляет собой интервал времени, в котором беспроводной канал предполагается остающимся примерно постоянным.
Принцип, описанный выше со ссылками на фиг.3А и 3В для Rx4-системы, может быть расширен на любую RxT-систему. Обучающая матрица и матрица усиления могут быть сформированы, как описано выше. Передатчик генерирует Т составных пилот-сигналов с использованием матрицы и Т векторов усиления в матрице и передает эти Т составных пилот-сигналов к MISO- и MIMO-приемникам. MISO- и MIMO-приемники могут оценивать свои MISO- и MIMO-каналы соответственно на основе принятых символов для Т составных пилот-сигналов.
2. Система с множеством антенн и множеством несущих
Система с множеством антенн может использовать множество несущих для передачи данных и пилот-сигналов. Множество несущих могут быть обеспечены на основе мультиплексирования с ортогональным частотным разделением (OFDM), некоторых других методов модуляции с множеством несущих или других схем. OFDM эффективно подразделяет всю ширину полосы системы (W МГц) на множество (К) ортогональных частотных поддиапазонов. Эти поддиапазоны также называются тонами, поднесущими, элементами разрешения и частотными каналами. В случае OFDM, каждый поддиапазон связывается с соответствующей поднесущей, которая может модулироваться данными. OFDM-система с множеством антенн может использовать только поднабор из общего количества К поддиапазонов для передачи данных и пилот-сигналов, а остальные поддиапазоны могут служить в качестве защитных поддиапазонов, чтобы обеспечить удовлетворение системных требований к спектральной маске. Для простоты, в последующем описании предполагается, что все К поддиапазонов могут использоваться для передачи данных и/или пилот-сигналов.
Беспроводной канал между передатчиком и приемником в OFDM-системе с множеством антенн может испытывать частотно-селективное замирание, которое характеризуется частотным откликом, который изменяется в пределах ширины полосы. К поддиапазонов для каждого SISO-канала могут в этом случае быть ассоциированы с различными комплексными усилениями каналов. Точная оценка канала для всех К поддиапазонов может потребоваться для восстановления передачи данных в некоторых или всех из этих поддиапазонов.
MISO-канал для MISO-приемника в OFDM-системе с множеством антенн может характеризоваться набором из К векторов-строк  отклика канала для k=1…K. Каждый из векторов-строк имеет размерность 1хТ и содержит Т элементов для усилений каналов между Т передающими антеннами и единственной приемной антенной для одного поддиапазона k. MIМO-канал для MIМO-приемника в OFDM-системе с множеством антенн может характеризоваться набором из К матриц
отклика канала для k=1…K. Каждый из векторов-строк имеет размерность 1хТ и содержит Т элементов для усилений каналов между Т передающими антеннами и единственной приемной антенной для одного поддиапазона k. MIМO-канал для MIМO-приемника в OFDM-системе с множеством антенн может характеризоваться набором из К матриц  отклика канала для k=1…K. Каждая матрица имеет размерность RхТ и содержит R·Т элементов для усилений каналов между Т передающими антеннами и R приемными антеннами для одного поддиапазона k.
отклика канала для k=1…K. Каждая матрица имеет размерность RхТ и содержит R·Т элементов для усилений каналов между Т передающими антеннами и R приемными антеннами для одного поддиапазона k.
Отклик канала для каждого SISO-канала может характеризоваться либо импульсным откликом канала во временной области, либо соответствующим частотным откликом канала в частотной области. Частотный отклик канала есть дискретное преобразование Фурье (ДПФ) импульсного отклика канала. Импульсный отклик канала для каждого SISO-канала может характеризоваться L отводами каналов временной области, где L в типовом случае намного меньше, чем общее число поддиапазонов, то есть L<K. То есть, если импульс подается на передающую антенну, то L выборок временной области с частотой дискретизации W МГц, полученных в приемной антенне на этот импульсный стимул, будут достаточны для характеристики отклика SISO-канала. Требуемое число L отводов каналов для импульсного отклика канала зависит от разброса задержки в системе, что выражается как разность по времени между самым ранним и самым поздним пришедшими компонентами сигнала с достаточной энергией в приемнике. Поскольку требуется только L отводов каналов для импульсного отклика канала, частотный отклик для каждого SISO-канала может полностью характеризоваться на основе оценок усилений каналов для L соответственно выбранных поддиапазонов, вместо общего числа К поддиапазонов.
На фиг.4 показана структура 400 поддиапазона, которая может использоваться для передачи пилот-сигнала в OFDM-системе с множеством антенн. Передаваемый символ передается на каждом из Р поддиапазонов пилот-сигналов, которые являются поддиапазонами, используемыми для передачи пилот-сигналов, причем обычно K>P≥L. Для повышения эффективности и упрощения обработки в приемнике, Р поддиапазонов пилот-сигналов могут быть равномерно распределены по всем К поддиапазонам, так что соседние поддиапазоны пилот-сигналов разнесены на К/Р поддиапазонов. Остальные К-Р поддиапазонов могут использоваться для передачи данных и называются поддиапазонами данных.
На фиг.5 показана примерная схема 500 передачи пилот-сигнала для OFDM-системы с множеством антенн. Для простоты, фиг.5 показывает передачу пилот-сигналов для Rx4-OFDM-системы с четырьмя передающими антеннами. Для этой схемы передачи пилот-сигналов передатчик циклически проходит по четырем векторам усиления в матрице и использует один вектор усиления в каждом периоде OFDM-символа (или просто в каждом «периоде символа»). Одна и та же матрица  и один и тот же вектор усиления могут использоваться для каждого из Р поддиапазонов пилот-сигналов. Составной пилот-сигнал для каждого поддиапазона может генерироваться, как показано в уравнении (11).
и один и тот же вектор усиления могут использоваться для каждого из Р поддиапазонов пилот-сигналов. Составной пилот-сигнал для каждого поддиапазона может генерироваться, как показано в уравнении (11).
Т составных пилот-сигналов для RxТ-OFDM-системы могут также передаваться другими способами. В другой схеме передачи пилот-сигналов Т составных пилот-сигналов, генерируемых с использованием векторов от  до
до  усиления, передаются в Т различных наборах поддиапазонов пилот-сигналов в одном периоде символа. В другой схеме передачи пилот-сигналов, составной пилот-сигнал, генерируемый с использованием вектора усиления для MISO-приемника, передается в первом наборе из Р поддиапазонов пилот-сигналов (например, в каждом периоде символа), и Т-1 дополнительных составных пилот-сигналов для MIМO-приемника передаются во втором наборе из Р поддиапазонов пилот-сигналов (например, путем циклического прохождения по векторам от до усиления в Т-1 периодах символа). В еще одной схеме передачи пилот-сигналов, Т составных пилот-сигналов передаются в различных наборах из Р поддиапазонов пилот-сигналов в различных периодах символов. Такой изменяющий свое положение пилот-сигнал позволяет MISO- и MIМO-приемникам получать реализации пилот-сигналов для более чем Р поддиапазонов, не увеличивая число поддиапазонов, используемых для передачи пилот-сигналов в любом одном периоде символа. В принципе, Т составных пилот-сигналов могут передаваться в любом числе наборов поддиапазонов пилот-сигналов и в любом числе периодов символов, и такие разные наборы могут иметь одно и то же или различное число поддиапазонов пилот-сигналов. Поддиапазоны пилот-сигналов в каждом наборе могут быть равномерно распределены по общему числу К поддиапазонов.
усиления, передаются в Т различных наборах поддиапазонов пилот-сигналов в одном периоде символа. В другой схеме передачи пилот-сигналов, составной пилот-сигнал, генерируемый с использованием вектора усиления для MISO-приемника, передается в первом наборе из Р поддиапазонов пилот-сигналов (например, в каждом периоде символа), и Т-1 дополнительных составных пилот-сигналов для MIМO-приемника передаются во втором наборе из Р поддиапазонов пилот-сигналов (например, путем циклического прохождения по векторам от до усиления в Т-1 периодах символа). В еще одной схеме передачи пилот-сигналов, Т составных пилот-сигналов передаются в различных наборах из Р поддиапазонов пилот-сигналов в различных периодах символов. Такой изменяющий свое положение пилот-сигнал позволяет MISO- и MIМO-приемникам получать реализации пилот-сигналов для более чем Р поддиапазонов, не увеличивая число поддиапазонов, используемых для передачи пилот-сигналов в любом одном периоде символа. В принципе, Т составных пилот-сигналов могут передаваться в любом числе наборов поддиапазонов пилот-сигналов и в любом числе периодов символов, и такие разные наборы могут иметь одно и то же или различное число поддиапазонов пилот-сигналов. Поддиапазоны пилот-сигналов в каждом наборе могут быть равномерно распределены по общему числу К поддиапазонов.
Для всех схем передачи пилот-сигнала MISO- и MIМO-приемники могут получать оценки частотных откликов для составного MISO-канала и индивидуальных SISO-каналов, соответственно, на основе своих принятых символов и с использованием различных методов оценивания каналов. Для наглядности, ниже описано оценивание канала с использованием метода наименьших квадратов.
На фиг.6 показан процесс 600, выполняемый MISO-приемником для оценивания канала в OFDM-системе с множеством несущих. MISO-приемник получает набор из Р принятых символов из Р поддиапазонов пилот-сигналов для каждого составного пилот-сигнала, который представляет собой Рх1-вектор  (блок 610). MISO-приемник выполняет Р-точечное обратное дискретное преобразование Фурье (ОДПФ) или обратное быстрое преобразование Фурье (ОБПФ) по каждому набору из Р принятых символов и выводит первоначальную оценку импульсного отклика для соответствующего составного пилот-сигнала, которая представляет собой Рх1-вектор
(блок 610). MISO-приемник выполняет Р-точечное обратное дискретное преобразование Фурье (ОДПФ) или обратное быстрое преобразование Фурье (ОБПФ) по каждому набору из Р принятых символов и выводит первоначальную оценку импульсного отклика для соответствующего составного пилот-сигнала, которая представляет собой Рх1-вектор  (блок 612). MISO-приемник затем фильтрует первоначальные оценки импульсных откликов для всех Т составных пилот-сигналов для получения оценки импульсного отклика наименьших квадратов для составного MISO-канала, которая представляет собой Рх1-вектор
(блок 612). MISO-приемник затем фильтрует первоначальные оценки импульсных откликов для всех Т составных пилот-сигналов для получения оценки импульсного отклика наименьших квадратов для составного MISO-канала, которая представляет собой Рх1-вектор  (блок 614). Вектор содержит Р отводов каналов, и фильтрация выполняется для каждого отвода канала. MISO-приемник может затем выполнить постобработку для Р отводов каналов вектора (блок 616). Постобработка может включать в себя, например, (1) сравнение с порогом для установки отводов каналов с величинами менее предварительно установленного порога в нуль и/или (2) усечение для установки последних L-P отводов каналов в векторе в нуль. Прошедший постобработку вектор затем заполняется нулями до длины К, чтобы получить заполненную нулями оценку
(блок 614). Вектор содержит Р отводов каналов, и фильтрация выполняется для каждого отвода канала. MISO-приемник может затем выполнить постобработку для Р отводов каналов вектора (блок 616). Постобработка может включать в себя, например, (1) сравнение с порогом для установки отводов каналов с величинами менее предварительно установленного порога в нуль и/или (2) усечение для установки последних L-P отводов каналов в векторе в нуль. Прошедший постобработку вектор затем заполняется нулями до длины К, чтобы получить заполненную нулями оценку  импульсного отклика (блок 618).
импульсного отклика (блок 618).
MISO-приемник затем выполняет К-точечное дискретное преобразование Фурье (ДПФ) или быстрое преобразование Фурье (БПФ) по К элементам для получения окончательной оценки частотного отклика для всех К поддиапазонов составного MISO-канала, которая представляет собой Кх1-вектор  (блок 620). содержит К оценок усилений каналов для К поддиапазонов. MISO-приемник может выполнить фильтрацию принятых символов
(блок 620). содержит К оценок усилений каналов для К поддиапазонов. MISO-приемник может выполнить фильтрацию принятых символов  , первоначальной оценки импульсного отклика, оценки импульсного отклика наименьших квадратов и/или окончательной оценки частотного отклика (например, полученных для множества периодов OFDM-символов) для получения более качественной оценки MISO-канала.
, первоначальной оценки импульсного отклика, оценки импульсного отклика наименьших квадратов и/или окончательной оценки частотного отклика (например, полученных для множества периодов OFDM-символов) для получения более качественной оценки MISO-канала.
Альтернативно, MISO-приемник может выполнить фильтрацию принятых символов для каждого поддиапазона пилот-сигнала и получить первоначальную оценку частотного отклика для Р поддиапазонов пилот-сигналов составного MISO-канала. MISO-приемник может затем обработать эту первоначальную оценку частотного отклика с использованием оценивания по методу наименьших квадратов (например, преобразовать во временную область, выполнить постобработку, заполнение нулями и преобразовать обратно в частотную область) для получения окончательной оценки частотного отклика для составного MISO-канала. MIMO-приемник может, таким образом, выполнить фильтрацию по отводам каналов во временной области, как описано выше со ссылкой на фиг.6, или по принятым символам в частотной области. Обработка во временной области, представленная на фиг.6, является более подходящей для схем передачи пилот-сигналов, которые передают Т составных пилот-сигналов в различных наборах поддиапазонов пилот-сигналов.
На фиг.7 показан процесс 700, выполняемый MIМO-приемником для оценивания канала в OFDM-системе с множеством несущих. MIМO-приемник получает набор из Р принятых символов из Р поддиапазонов пилот-сигналов для каждой отличающейся комбинации приемной антенны и составного пилот-сигнала (блок 710). Набор из Р принятых символов для приемной антенны i и составного пилот-сигнала m обозначается как  или
или  для k∈Pset, где Pset обозначает набор Р поддиапазонов пилот-сигналов. MIМO-приемник получает R·T наборов принятых сигналов для R приемных антенн и Т составных пилот-сигналов. Эти R·T наборов принятых сигналов могут быть выражены в следующем виде:
для k∈Pset, где Pset обозначает набор Р поддиапазонов пилот-сигналов. MIМO-приемник получает R·T наборов принятых сигналов для R приемных антенн и Т составных пилот-сигналов. Эти R·T наборов принятых сигналов могут быть выражены в следующем виде:
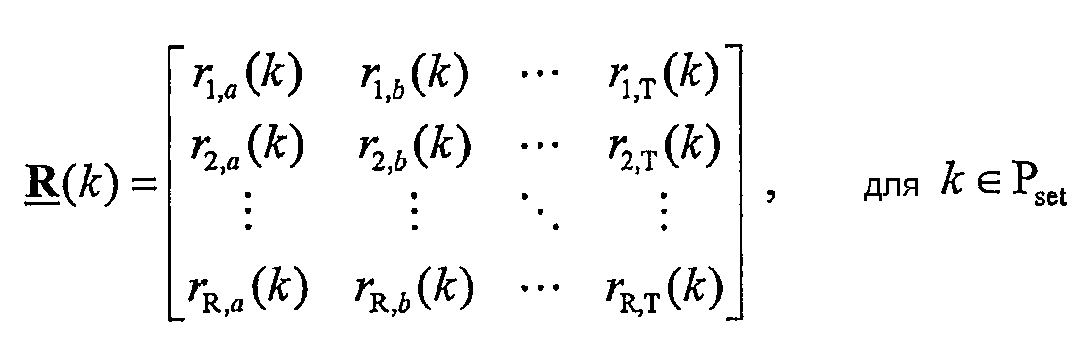 (20)
(20)
Матрица  для каждого поддиапазона k пилот-сигнала имеет размерность RхT и содержит Т столбцов принятых символов, полученных из поддиапазона k пилот-сигнала для Т составных пилот-сигналов. Матрица , таким образом, подобна матрице
для каждого поддиапазона k пилот-сигнала имеет размерность RхT и содержит Т столбцов принятых символов, полученных из поддиапазона k пилот-сигнала для Т составных пилот-сигналов. Матрица , таким образом, подобна матрице  , описанной выше в уравнении (14) для системы с множеством антенн с одной несущей.
, описанной выше в уравнении (14) для системы с множеством антенн с одной несущей.
MIМO-приемник выполняет Р-точечное ОДПФ или ОБПФ по набору Р принятых символов для каждой комбинации приемной антенны i и составного пилот-сигнала m для получения первоначальной оценки  импульсного отклика Р отводов для данной комбинации приемной антенны и составного пилот-сигнала (блок 712). R·T первоначальных оценок импульсных откликов для R приемных антенн и Т составных пилот-сигналов могут быть выражены в следующем виде:
импульсного отклика Р отводов для данной комбинации приемной антенны и составного пилот-сигнала (блок 712). R·T первоначальных оценок импульсных откликов для R приемных антенн и Т составных пилот-сигналов могут быть выражены в следующем виде:
 (21)
(21)
MIМO-приемник затем получает оценки импульсных откликов наименьших квадратов для индивидуальных SISO-каналов MIMO-канала (блок 714) в следующем виде:
 (22)
(22)
Из уравнения (22), MIМO-приемник получает R·T оценок  импульсных откликов наименьших квадратов для i=1…R и j=1…T. Каждая оценка импульсного отклика наименьших квадратов содержит Р отводов каналов, которые могут затем подвергаться постобработке путем выполнения сравнения с порогом и/или усечения (блок 716). Каждая прошедшая постобработку оценка или последовательность импульсного отклика затем заполняется нулями до длины К (блок 718). MIМO-приемник затем выполняет К-точечное ДПФ или БПФ по каждой заполненной нулями последовательности для получения окончательной оценки
импульсных откликов наименьших квадратов для i=1…R и j=1…T. Каждая оценка импульсного отклика наименьших квадратов содержит Р отводов каналов, которые могут затем подвергаться постобработке путем выполнения сравнения с порогом и/или усечения (блок 716). Каждая прошедшая постобработку оценка или последовательность импульсного отклика затем заполняется нулями до длины К (блок 718). MIМO-приемник затем выполняет К-точечное ДПФ или БПФ по каждой заполненной нулями последовательности для получения окончательной оценки  частотного отклика для одного SISO-канала (блок 720). Оценка
частотного отклика для одного SISO-канала (блок 720). Оценка  содержит К оценок усилений каналов для К поддиапазонов SISO-канала между передающей антенной j и приемной антенной i.
содержит К оценок усилений каналов для К поддиапазонов SISO-канала между передающей антенной j и приемной антенной i.
Альтернативно, MIМO-приемник может получить первоначальную оценку  частотного отклика для каждого поддиапазона пилот-сигнала в следующем виде:
частотного отклика для каждого поддиапазона пилот-сигнала в следующем виде:
 (23)
(23)
Первоначальные оценки частотного отклика для Р поддиапазонов пилот-сигналов могут быть представлены блочно-структурированной матрицей  . Каждый элемент во фронтальном размере матрицы
. Каждый элемент во фронтальном размере матрицы  представляет первоначальную оценку частотного отклика для Р поддиапазонов пилот-сигналов одного SISO-канала. MIМO-приемник затем обрабатывает каждую первоначальную оценку частотного отклика (например, аналогично тому, как описано выше для ) для получения окончательной оценки частотного отклика для всех К поддиапазонов SISO-канала.
представляет первоначальную оценку частотного отклика для Р поддиапазонов пилот-сигналов одного SISO-канала. MIМO-приемник затем обрабатывает каждую первоначальную оценку частотного отклика (например, аналогично тому, как описано выше для ) для получения окончательной оценки частотного отклика для всех К поддиапазонов SISO-канала.
MIМO-приемник может затем выполнять матричное перемножение с использованием  по отводам каналов временной области, как показано в уравнении (22), или по принятым символам частотной области, как показано в уравнении (23), для получения оценок каналов для отдельных SISO-каналов. Обработка во временной области согласно уравнению (22) является более подходящей для схем передачи пилот-сигналов, в которых Т составных пилот-сигналов передаются в различных наборах поддиапазонов пилот-сигналов.
по отводам каналов временной области, как показано в уравнении (22), или по принятым символам частотной области, как показано в уравнении (23), для получения оценок каналов для отдельных SISO-каналов. Обработка во временной области согласно уравнению (22) является более подходящей для схем передачи пилот-сигналов, в которых Т составных пилот-сигналов передаются в различных наборах поддиапазонов пилот-сигналов.
MIМO-приемник может затем выполнять фильтрацию по принятым символам , по первоначальным оценкам импульсного отклика, оценкам импульсного отклика наименьших квадратов и/или по окончательным оценкам  частотного отклика. Фильтрация обычно выполняется отдельно для каждого поддиапазона k или индекса τ отвода, а также для одной и той же пары индексов (i,m) или (i,j).
частотного отклика. Фильтрация обычно выполняется отдельно для каждого поддиапазона k или индекса τ отвода, а также для одной и той же пары индексов (i,m) или (i,j).
MISO- и MIMO-приемники могут также получать окончательные оценки частотного отклика на основе других форм интерполяции, вместо метода наименьших квадратов.
3. Разнесение
Передатчик может передавать пилот-сигнал таким способом, чтобы обеспечить режим разнесения. Для ОFDM-системы с множеством антенн передатчик может генерировать каждый составной пилот-сигнал следующим образом:
 (24)
(24)
где  является диагональной ТхТ-матрицей следующей формы:
является диагональной ТхТ-матрицей следующей формы:
 (25)
(25)
где bj(k) - вес для поддиапазона k передающей антенны j. Вес bj(k) может быть определен следующим образом:
 (26)
(26)
где Dj - задержка для передающей антенны j.
Веса, показанные в уравнении (26), соответствуют нарастающему фазовому сдвигу по всем К поддиапазонам каждой передающей антенны. Фазовый сдвиг изменяется с разными скоростями для Т передающих антенн. Эти веса эффективно образуют отличающийся луч от Т передающих антенн для каждого поддиапазона, что обеспечивает разнесение. Пространственная обработка, показанная в уравнении (26), может эквивалентным образом выполняться во временной области путем (1) выполнения К-точечного ОДПФ по К символам, которые должны передаваться в К поддиапазонах каждой передающей антенны j, для получения К выборок временной области для этой передающей антенны и (2) циклического изменения задержки (или циклического сдвига) К выборок временной области для каждой передающей антенны j посредством Dj. Задержка для каждой передающей антенны может быть выбрана, например, как Dj =ΔD·(j-1) для j=1…T, где ΔD может быть равно одному периоду выборки, или быть больше, чем один период выборки. Выборки временной области для каждой антенны являются, таким образом, задержанными циклическим образом на отличающуюся величину. Наибольшая задержка для всех Т передающих антенн должна быть меньше, чем длина L канала.
Для системы с множеством антенн с одной несущей передатчик может задерживать передачу символа для каждой передающей антенны j на Dj. Наибольшая задержка для всех Т передающих антенн может быть выбрана меньшей, чем (например, как малая доля) один период символа.
Для систем с множеством антенн как с одной несущей, так и множеством несущих, MISO-приемник может получать оценку составного MISO-канала способом, описанным выше. Однако импульсный отклик канала, наблюдаемый MISO-приемником, для каждой передающей антенны j циклически задержан на Dj, ввиду обработки разнесения, выполняемой передатчиком. Импульсный отклик составного MISO-канала, наблюдаемый в этом случае, имеет вид: hmiso(τ)=h1(τ-D1)+h2(τ-D2)+…+hT(τ-DT) и содержит Т циклически задержанных импульсных откликов канала для Т передающих антенн. Если данные передаются тем же способом, что и пилот-сигнал, что обычно имеет место, то оценка составного MISO-канала, получаемая MISO-приемником, пригодна для детектирования данных.
MIМO-приемник может получать оценки отдельных SISO-каналов способом, описанным выше. Однако импульсный отклик для каждого SISO-канала каждой передающей антенны j циклически задержан на Dj, что вводится передатчиком для данной передающей антенны. MIМO-приемник, таким образом, наблюдает импульсные отклики канала {hi,j(τ-Dj)} для i=1 … R и j=1…Т для SISO-каналов. MIМO-приемник может циклически сдвигать каждую из R оценок импульсного отклика SISO-канала для каждой передающей антенны j на величину задержки Dj для этой передающей антенны. MIМO-приемник, таким образом, может надлежащим образом выравнивать R·T оценок импульсных откликов для R·T SISO-каналов между T передающими антеннами и R приемными антеннами. Если данные и пилот-сигнал передаются от каждой передающей антенны j с задержкой Dj, то MIМO-приемнику не требуется циклически сдвигать оценку импульсного отклика каждого SISO-канала. В принципе, оценивание канала выполняется способом, соответствующим передаче данных.
4. Система
Фиг.8 показывает блок-схему передатчика 110х, MISO-приемника 150х и MIMO-приемника 150y в OFDM-системе с множеством антенн. В передатчике 110х, процессор 820 TX-данных принимает, кодирует, выполняет перемежение и отображение на символы (или модуляцию) данных трафика и обеспечивает символы {s(k)} данных. Каждый символ данных является символом модуляции для данных. Процессор 830 TX-пространственной обработки получает символы данных и выполняет пространственную обработку символов данных, генерирует составные пилот-сигналы, мультиплексирует символы данных с передаваемыми символами для составных пилот-сигналов и выдает Т потоков выходных символов на передающие блоки от 832а до 832t. Каждый выходной символ может относиться к данным или к пилот-сигналу и передается в поддиапазоне одной передающей антенны в одном периоде OFDM-символа. Каждый передающий блок 832 обрабатывает свой поток выходных символов и генерирует модулированный сигнал. Т передающих блоков от 832а до 832t выдают Т модулированных сигналов для передачи через Т антенн от 834а до 834t соответственно.
В MISO-приемнике 150х, антенна 852х принимает Т модулированных сигналов от передатчика 110х и выдает принятый сигнал на приемный блок 854х. Приемный блок 854х выполняет обработку, являющуюся комплементарной той обработке, которая выполнялась в передающих блоках 832, и выдает (1) принятые символы данных на детектор 860х и (2) принятые символы пилот-сигналов на блок 884х оценивания канала в контроллере 880х. Блок 884х оценивания канала выполняет оценивание канала для MISO-приемника и выдает оценку отклика составного MISO-канала. Детектор 860х выполняет детектирование (например, согласованную фильтрацию и/или выравнивание) по принятым символам данных с использованием оценки отклика составного MISO-канала и выдает продетектированные символы, которые являются оценками символов данных, переданных передатчиком 110х. Процессор 870 RX-данных затем выполняет обращенное отображение символов, обращенное перемежение и декодирует продетектированные символы и выдает декодированные данные, которые являются оценкой переданных данных трафика.
В MIМO-приемнике 150у, R антенн от 852а до 852r принимают Т модулированных сигналов от передатчика 110х, и каждая антенна 852 выдает принятый сигнал на соответствующий приемный блок 854. Каждый приемный блок 854 выполняет обработку, являющуюся комплементарной той обработке, которая выполнялась в передающих блоках 832, и выдает (1) принятые символы данных на процессор 860у RX-пространственной обработки и (2) принятые символы пилот-сигналов на блок 884у оценивания канала в контроллере 880у. Блок 884у оценивания канала выполняет оценивание канала для MIМO-приемника и выдает оценку  отклика MIМO-канала. Процессор 860у RX-пространственной обработки выполняет пространственную обработку для R принятых потоков символов данных с R приемных блоков от 854а до 854r с использованием оценки отклика MIМO-канала и выдает продетектированные символы. Процессор 870у RX-данных выполняет обращенное отображение символов, обращенное перемежение и декодирует продетектированные символы и выдает декодированные данные.
отклика MIМO-канала. Процессор 860у RX-пространственной обработки выполняет пространственную обработку для R принятых потоков символов данных с R приемных блоков от 854а до 854r с использованием оценки отклика MIМO-канала и выдает продетектированные символы. Процессор 870у RX-данных выполняет обращенное отображение символов, обращенное перемежение и декодирует продетектированные символы и выдает декодированные данные.
Контроллеры 840, 880х и 880у управляют работой различных блоков обработки в передатчике 110х, MISO-приемнике 150х и MIMO-приемнике 150у соответственно. Блоки памяти 842, 882х, 882у сохраняют данные и/или программные коды, используемые контроллерами 840, 880х и 880у соответственно.
Фиг.9 показывает блок-схему варианта выполнения процессора 830 ТХ-пространственной обработки и передающих блоков 832 в передатчике 110х. Процессор 830 ТХ-пространственной обработки содержит генератор 910 пилот-сигналов, процессор 920 пространственной обработки данных и Т мультиплексоров от 930а до 930t для Т передающих антенн.
Генератор 910 пилот-сигналов генерирует Т составных пилот-сигналов для MISO- и MIMO-приемников. Для генерации составного пилот-сигнала m для поддиапазона k пилот-сигнала, T скалярных умножителей от 912а до 912t умножают T символов от pa(k) до pT(k) пилот-сигнала для T обучающих пилот-сигналов на T усилений от gm,a до gm,T соответственно в векторе  . Т векторных умножителей от 914а до 914t умножают T масштабированных символов пилот-сигналов с T умножителей от 912а до 912t на T обучающих векторов от
. Т векторных умножителей от 914а до 914t умножают T масштабированных символов пилот-сигналов с T умножителей от 912а до 912t на T обучающих векторов от  до
до  соответственно в матрице
соответственно в матрице  . Объединитель 916 получает и суммирует Т векторов с умножителей от 914а до 914t и генерирует вектор
. Объединитель 916 получает и суммирует Т векторов с умножителей от 914а до 914t и генерирует вектор  символов передачи для составного пилот-сигнала m в поддиапазоне k пилот-сигнала. В принципе, одни и те же или разные символы пилот-сигнала могут использоваться для T обучающих пилот-сигналов. Одни и те же или разные символы пилот-сигнала, одни и те же или разные вектора усилений и одни и те же или разные обучающие матрицы могут использоваться для поддиапазонов пилот-сигналов.
символов передачи для составного пилот-сигнала m в поддиапазоне k пилот-сигнала. В принципе, одни и те же или разные символы пилот-сигнала могут использоваться для T обучающих пилот-сигналов. Одни и те же или разные символы пилот-сигнала, одни и те же или разные вектора усилений и одни и те же или разные обучающие матрицы могут использоваться для поддиапазонов пилот-сигналов.
Процессор 920 пространственной обработки данных получает символы {s(k)} от процессора 820 ТХ-пространственной обработки и выполняет обработку сигналов над этими символами данных. Например, процессор 920 пространственной обработки данных может мультиплексировать символы данных в Т подпотоков для Т передающих антенн. Процессор 920 пространственной обработки данных может выполнять или не выполнять дополнительную пространственную обработку для этих подпотоков, в зависимости от построения системы. Каждый мультиплексор 930 принимает соответствующий подпоток символов данных от процессора 920 пространственной обработки данных и символы передачи для связанной с ним передающей антенны j, мультиплексирует символы данных с символами передачи и выдает выходной поток символов.
Каждый передающий блок 832 принимает и обрабатывает соответствующий выходной поток символов. В каждом передающем блоке 832 блок 942 ОБПФ преобразует каждый набор из К выходных символов для всех К поддиапазонов во временную область с использованием К-точечного ОБПФ и выдает преобразованный символ, содержащий К элементарных посылок временной области. Генератор 944 циклического префикса повторяет часть каждого преобразованного символа для формирования OFDM-символа, который содержит К+С элементарных посылок, где С - число повторенных элементарных посылок. Повторенная часть называется циклическим префиксом и используется для противодействия разбросу задержек в беспроводном канале. Радиочастотный (РЧ) ТХ-блок 946 преобразует поток OFDM-символов в один или более аналоговых сигналов и затем усиливает, фильтрует и преобразует с повышением частоты аналоговые сигналы для генерации модулированного сигнала, который передается от соответствующей антенны 834. Генератор 944 циклического префикса и РЧ ТХ-блок 946 могут также обеспечивать циклическую задержку для соответствующей передающей антенны.
Фиг.10А показывает блок-схему варианта осуществления приемного блока 854i, который может использоваться для каждого приемного блока в MISO-приемнике 150х и в MIMO-приемнике 150у. В приемном блоке 854i, РЧ RX-блок 1012 обрабатывает (например, фильтрует, усиливает и преобразует с понижением частоты) принятый сигнал с соответствующей антенны 852i, оцифровывает преобразованный сигнал и выдает поток выборок. Блок 1014 удаления циклического префикса удаляет циклический префикс, присоединенный к каждому OFDM-символу, и выдает принятый преобразованный символ. Блок 1016 БПФ преобразует К выборок для каждого принятого преобразованного символа в частотную область с использованием К-точечного БПФ и получает К принятых символов для К поддиапазонов. Для MISO-приемника 150х, блок 1016 БПФ выдает принятые символы данных для поддиапазонов данных в детектор 860х, а принятые символы пилот-сигналов для поддиапазонов пилот-сигналов - в блок 884х оценивания канала. Для MIМО-приемника 150у, блок 1016 БПФ выдает принятые символы данных для поддиапазонов данных в процессор 860у RX-пространственной обработки, а принятые символы пилот-сигналов для поддиапазонов пилот-сигналов - в блок 884у оценивания канала.
Фиг.10В показывает вариант осуществления блока 884у оценивания канала для MIМО-приемника 150у, который реализует метод прямого оценивания наименьших квадратов. В блоке 884у оценивания канала, блок 1020 БПФ получает набор принятых символов пилот-сигналов для каждой комбинации приемной антенны i и составного пилот-сигнала m и выполняет Р-точечное ОБПФ над принятым набором символов для получения первоначальной оценки импульсного отклика для данной комбинации приемной антенны и составного пилот-сигнала. Блок 1022 матричного умножения получает R·T первоначальных оценок импульсных откликов для R приемных антенн и Т составных пилот-сигналов, умножает эти R·T первоначальных оценок импульсных откликов на матрицы  и
и  для каждого отвода, как показано в уравнении (22), и выдает R·T оценок импульсных откликов наименьших квадратов для R·T SISO-каналов MIMO-канала. Постпроцессор 1024 может выполнить сравнение с порогом и/или усечение и дополнительно выполняет заполнение нулями для каждой оценки импульсного отклика наименьших квадратов. Блок 1026 БПФ выполняет К-точечное БПФ по каждой заполненной оценке импульсного отклика и выдает соответствующую окончательную оценку частотного отклика. Блок 884у оценивания канала может выполнять фильтрацию по принятым символам , по первоначальным оценкам импульсного отклика, оценкам импульсного отклика наименьших квадратов и/или по окончательным оценкам частотного отклика. Блок 884у оценивания канала выдает окончательные оценки частотного отклика для всех SISO-каналов в процессор 860у RX-пространственной обработки. Процессор 860у RX-пространственной обработки использует эти оценки каналов для пространственной обработки принятых символов данных для получения продетектированных символов
для каждого отвода, как показано в уравнении (22), и выдает R·T оценок импульсных откликов наименьших квадратов для R·T SISO-каналов MIMO-канала. Постпроцессор 1024 может выполнить сравнение с порогом и/или усечение и дополнительно выполняет заполнение нулями для каждой оценки импульсного отклика наименьших квадратов. Блок 1026 БПФ выполняет К-точечное БПФ по каждой заполненной оценке импульсного отклика и выдает соответствующую окончательную оценку частотного отклика. Блок 884у оценивания канала может выполнять фильтрацию по принятым символам , по первоначальным оценкам импульсного отклика, оценкам импульсного отклика наименьших квадратов и/или по окончательным оценкам частотного отклика. Блок 884у оценивания канала выдает окончательные оценки частотного отклика для всех SISO-каналов в процессор 860у RX-пространственной обработки. Процессор 860у RX-пространственной обработки использует эти оценки каналов для пространственной обработки принятых символов данных для получения продетектированных символов  , которые являются оценками переданных символов
, которые являются оценками переданных символов  данных.
данных.
Описанные способы передачи пилот-сигнала и оценивания канала могут быть использованы для различных систем, основанных на OFDM. Одной такой системой является система связи множественного доступа с ортогональным частотным разделением каналов, которая использует OFDM и может одновременно поддерживать множество пользователей. Система на основе OFDM также может использовать скачкообразное изменение частоты, так что данные передаются в разных поддиапазонах в различные временные интервалы, которые также называются интервалами скачкообразного изменения. Для каждого пользователя может быть определен конкретный(ые) поддиапазон(ы) для использования при передаче данных в каждом интервале скачкообразного изменения, например, посредством псевдослучайной последовательности скачкообразного изменения частоты, назначенной данному пользователю. Для системы OFDM со скачкообразным изменением частоты, пилот-сигнал и данные могут передаваться в разных поддиапазонах. Каждому пользователю может потребоваться оценивать весь отклик MISO- или MIMO-канала (например, для всех К поддиапазонов).
Описанные способы передачи пилот-сигнала и оценивания канала могут быть реализованы различными средствами. Например, передача пилот-сигнала и оценивание канала могут быть реализованы в виде аппаратных средств, программного обеспечения или их комбинации. Для реализации с помощью аппаратных средств, блоки обработки, используемые для передачи пилот-сигнала в передатчике могут быть реализованы на одной или более специализированных интегральных схемах (ASIC), с помощью цифрового процессора сигналов (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных блоков, предназначенных для выполнения описанных функций, или комбинации указанных средств.
Для программной реализации, описанная обработка может быть реализована модулями (например, процедурами, функциями и т.д.), которые выполняют описанные функции. Коды программного обеспечения могут храниться в блоке памяти (например, в блоках 842, 882х и 882у на фиг.8) и исполняться процессором (например, контроллерами 840, 880х и 880у). Блок памяти может быть реализован в процессоре или быть внешним относительно процессора, и в этом случае он может коммуникативно связываться с процессором различными средствами, известными в технике.
Заголовки включены в описание для ссылки и для облегчения нахождения соответствующих разделов. Эти заголовки не предназначены для ограничения объема принципов, описанных под ними, и указанные принципы могут применяться и в других разделах описания.
Настоящее описание раскрытых вариантов осуществления предусмотрено для обеспечения возможности любому специалисту в данной области техники реализовать и использовать настоящее изобретение. Различные модификации этих вариантов осуществления должны быть очевидны для специалистов в данной области техники, и общие определенные выше принципы могут быть применены к другим вариантам осуществления без отклонения от сущности и объема изобретения. Таким образом, настоящее изобретение не ограничено представленными вариантами осуществления, а должно соответствовать самому широкому объему, совместимому с раскрытыми принципами и новыми признаками.
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов

