Результат интеллектуальной деятельности: УСТРОЙСТВО ИЗМЕРЕНИЯ ДЕФЕКТОВ УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С ДВУМЯ ОПТОЭЛЕКТРОННЫМИ ДАТЧИКАМИ
Вид РИД
Изобретение
Настоящее изобретение относится к устройству измерения дефектов устройства формирования изображения с оптоэлектронным датчиком, а также устройства коррекции дефектов, содержащего такое устройство измерения.
Оптический прибор, такой как телескоп, установленный на спутнике наблюдения на орбите, может подвергнуться расфокусировке, в частности, в результате термоупругих эффектов и дегазации структуры.
Необходимость хорошей контрастности изображений предполагает точное измерение этой расфокусировки и применение устройства перефокусировки, которое приводится в действие в зависимости от результата измерения.
В известных технических решениях эти проблемы определения расфокусировки решались разными способами:
- путем сравнения с конфигурациями, выполненными при разной расфокусировке, однако такой способ является не очень точным,
- путем анализа волновой поверхности, но его применение возможно только при наличии сложной системы,
- при помощи метода измерения, согласно которому изменяют механизм перефокусировки и выбирают наилучшую фокусировку, но его применение является сложным,
- при помощи специального устройства, такого как оптический делитель линий (называемый “DIVOLI”). Это устройство требует осуществления на земле идеальной оптической юстировки между детекторами-гомологами, к тому же применяемой в оптической комбинации стекла.
Кроме того, известен метод, называемый «диверсификацией фаз», в котором на основании изображения объекта и искаженного изображения этого же объекта относительно первого изображения с дельтой расфокусировки, определенной при помощи дополнительного датчика, как правило, расфокусированного на долю длины волны, или путем воздействия на механизм фокусировки, применяют специальный алгоритм, позволяющий выявить не только расфокусировку, но также и другие классические оптические аберрации.
Из документа JP 1022797 А известно устройство фокусировки, которое содержит делитель оптического потока и в котором детекторную планку перемещают по отношению к плоскости наилучшей оптической фокусировки, что усложняет его реализацию и делает его чувствительным к ускорениям, а также снижает его надежность в космической пространстве.
Кроме того, из документов US 2005/0270611 А1 и US 2007/0102620 известны микроскопы с устройствами определения фокусировки, содержащие делители световых пучков, и пьезоэлектрический механизм для устройства согласно первому из этих документов, поэтому эти устройства являются громоздкими и их трудно применять для космических телескопов.
Настоящее изобретение призвано предложить устройство измерения дефектов, таких как оптические аберрации устройства формирования изображений с оптоэлектронным датчиком, содержащим несколько чувствительных элементов, которое является простым в изготовлении и в применении, максимально дешевым и имеющим минимальные габариты, а также устройство коррекции дефектов, использующее такое устройство измерения, причем эти устройства выполнены с возможностью предупреждения блокировки в пространстве. Кроме того, в условиях космического пространства механизмы могут подвергаться блокировкам, которые трудно обнаружить во время наземных испытаний, в частности, по причине действия силы тяжести и разных температур. Следует также отметить, что движения механизмов могут вызвать вибрации спутников, на которых они установлены, что является недостатком, когда установленные на борту этих спутников приборы работают на формирование изображения.
Устройство в соответствии с настоящим изобретением является статичным устройством, отличающимся тем, что содержит, по меньшей мере, один второй датчик, расположенный в плоскости, наклоненной относительно плоскости, содержащей первый датчик, и относительно оптической оси устройства формирования изображений и сканирующий ту же зону, что и первый датчик, и устройство вычисления оптических аберраций, влияющих на каждый чувствительный элемент двух датчиков, причем эта наклонная плоскость содержит прямую, соединяющую два датчика и содержащуюся в упомянутой плоскости, содержащей первый датчик.
Под «статичным устройством» следует понимать то, что устройство в соответствии с настоящим изобретением не подвергается последовательным перефокусировкам и перемещениям оптического компонента в отличие от известных устройств, что делает устройство в соответствии с настоящим изобретением простым и менее подверженным повреждениям, чем эти известные устройства.
Настоящее изобретение будет более очевидно из нижеследующего подробного описания варианта выполнения, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
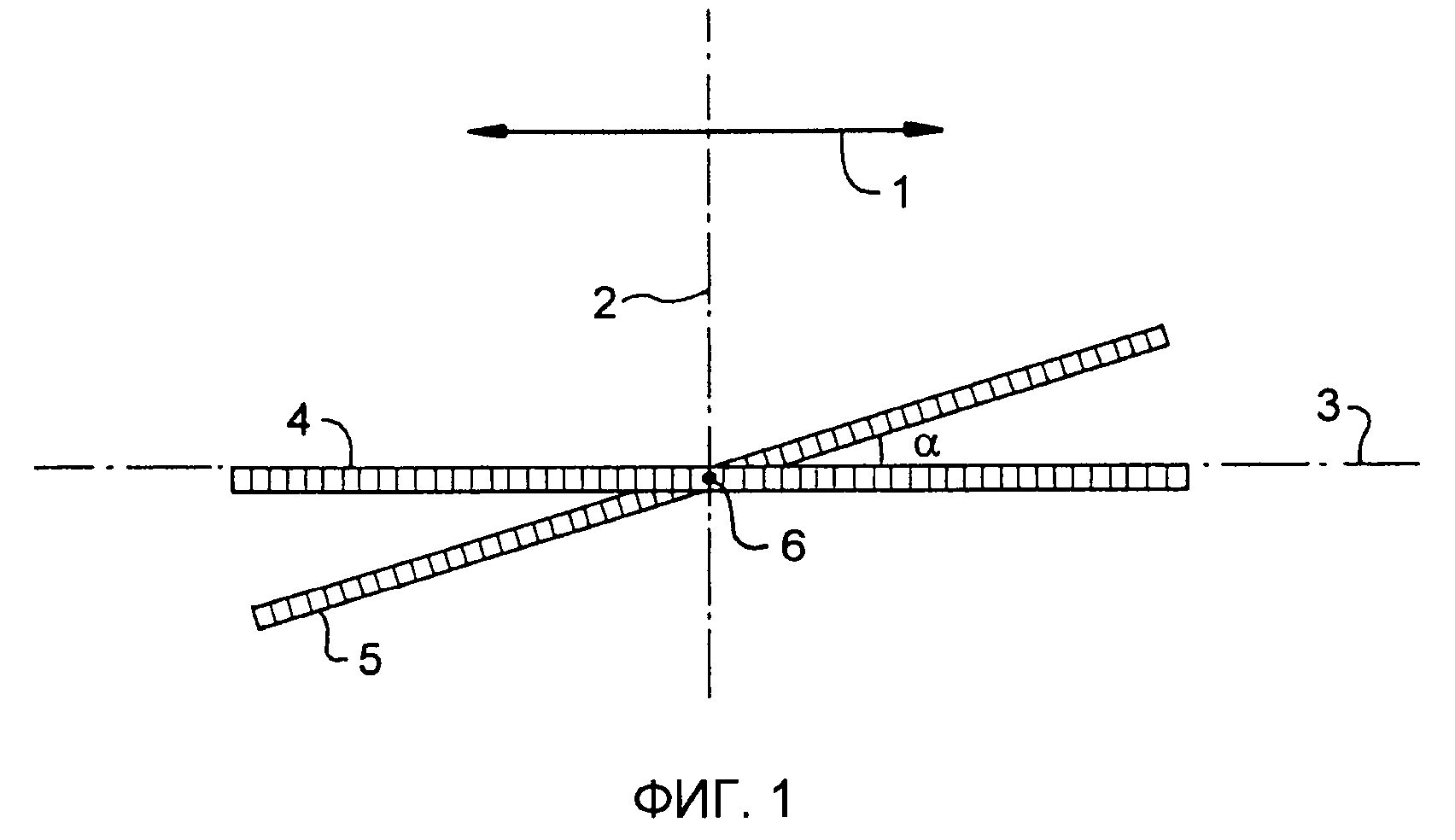
Фиг. 1 - упрощенный схематичный вид сбоку устройства для осуществления способа в соответствии с настоящим изобретением;
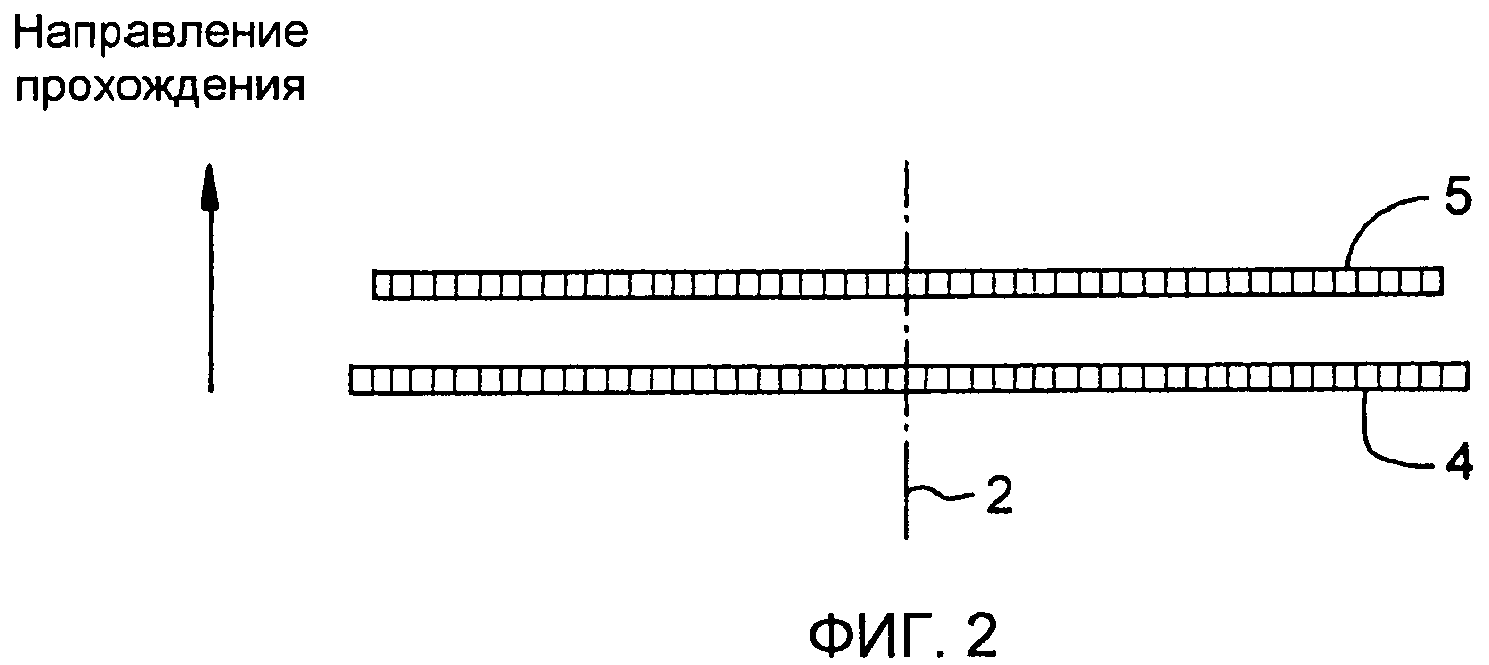
Фиг. 2 - вид сверху устройства, показанного на фиг. 1, в случае линейной детекторной планки;
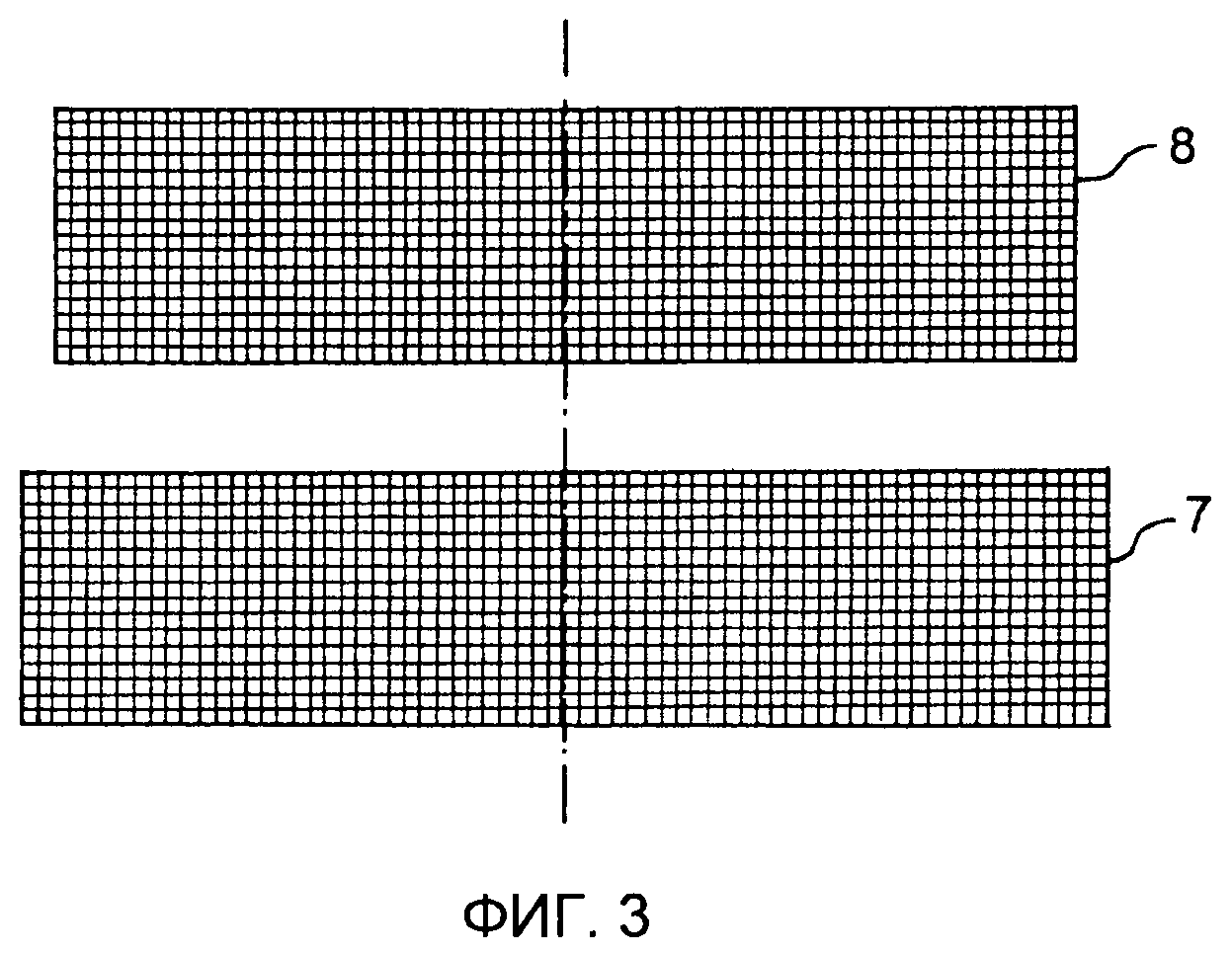
Фиг. 3 - вид сверху устройства, показанного на фиг. 1, в случае матричного расположения детекторов.
Настоящее изобретение описано в применении для оптоэлектронного прибора, такого как телескоп с оптоэлектронным датчиком, установленный на борту спутника наблюдения, корректируемым дефектом которого является расфокусировка, но, разумеется, изобретение не ограничивается этим вариантом применения и может применяться для наземного оборудования или бортового оборудования летательных аппаратов, отличных от спутников (самолет, вертолет или беспилотное средство), причем этим оборудованием могут быть как телескопы, так и другие оптоэлектронные приборы, и их корректируемыми дефектами могут быть как расфокусировка, так и другие типы оптических дефектов, такие как астигматизм, сферическая аберрация и кома. Для коррекции этих других дефектов следует определить функцию перехода, зависящую от оптической комбинации, которая для всех измеряемых аберраций позволяет найти наилучшую коррекцию с точки зрения деформаций или перемещения оптических элементов телескопа.
Кроме того, изобретение описано в применении для спутника, на котором получение изображений осуществляют в режиме съемки “Push-Broom” (сканирование наблюдаемой зоны), но, разумеется, оно не ограничивается этим способом формирования изображений и может применяться с другими технологиями получения изображений. В частности, изобретение можно применять для спутников, содержащих оптоэлектронную матрицу (спутник на протяженной, геостационарной или астрономической орбите), при условии, что с наклонной матрицей и с номинальной матрицей можно сканировать одну и ту же сцену при помощи оптического устройства, такого как зеркало, или путем изменения точки наведения спутника или прибора.
На чертежах схематично показана только часть, образующая светочувствительную матрицу телескопа спутника наблюдения земли, поскольку его оптическая часть, так же как и схемы преобразования электрических сигналов светочувствительной матрицы, выполнены классически и поэтому на чертежах не показаны. Реализация схем обработки сигнала, осуществляющих измерение расфокусировки и, случае необходимости, измерение низкочастотных аберраций, будет очевидна для специалиста из настоящего описания.
На фиг. 1 схематично показано классическое устройство 1 получения изображений с телескопа, оптическая ось которого обозначена позицией 2, и плоскость, называемая в дальнейшем «фокальной плоскостью», обозначена позицией 3. Матричная часть системы получения изображений телескопа в первом варианте выполнения (фиг.1 и 2) изначально содержит линейную планку 4 оптоэлектронных чувствительных элементов, расположенную в фокальной плоскости 3 (и совпадающую с линией этой фокальной плоскости на фиг. 1). В настоящем описании термин «датчик» обозначает любой оптоэлектронный компонент, который можно использовать вместе с оптическим прибором, например телескопом, чтобы реализовать систему получения изображений вышеупомянутого типа.
Необходимо отметить, что фокальная плоскость 3 определяется не тем, что является плоскостью наилучшей фокусировки оптики прибора, а тем, что содержит номинальную линейную планку 4.
Согласно изобретению, возле планки 4 и параллельно ей располагают другую линейную планку 5 детекторов, как правило, аналогичную или более короткую, чем планка 4, которая в настоящем примере входит в оптическое поле оптического устройства 1. Считается, что планка 5 параллельна планке 4, когда их проекции на плоскость, перпендикулярную к оптической оси 2, параллельны между собой, как показано на фиг. 2. Однако планка 5 не содержится в плоскости, содержащей планку 4 и перпендикулярной к оптической оси, а только пересекает ее по прямой линии, что показано ввиде точки 6 на фиг. 1. Как правило, эта прямая 6 содержится в двух плоскостях, каждая из которых содержит одну из двух планок (или, точнее, чувствительные поверхности этих планок, которые можно представить как двухмерные), но она не обязательно должна проходить через середину длины каждой из этих двух планок. Плоскость планки 5 образует угол α с фокальной плоскостью 3. В зависимости от применяемого метода измерения значение угла α зависит от оценки максимальной расфокусировки прибора и от длины планки или же, в случае применения метода «диверсификации фаз», от доли или от кратного числа длины оптической волны и от длины планки, при этом синус угла является соотношением между максимальной расфокусировкой и половиной длины планки. В дальнейшем планка 4 будет также называться номинальной планкой, а планка 5 - наклонной планкой. Точка 6 показана на середине длины планки 5 и на оси 2, но это не является обязательным условием, и эта точка (которая соответствует пересечению планки 5 с фокальной плоскостью 3) может быть удалена от оси 2 и/или не находиться на середине планки 6.
Следует отметить, что в примере, представленном на чертеже, планка 5 находится близко к планке 4, но, в частности, если в оптическом поле устройства нет достаточного пространства для размещения планки 5, ее можно расположить за пределами этого поля и обеспечить для нее наблюдение той же зоны, которую наблюдает планка 4 (но не обязательно одновременно для двух планок), при помощи вспомогательного устройства, такого как отражающее зеркало. Чтобы планка 5 могла наблюдать ту же зону, что и планка 4, можно воспользоваться прохождением спутника-носителя или маневром спутника-носителя либо прибегнуть к повороту прибора, чтобы переместить ось визирования телескопа таким образом, чтобы зона земли (или пространства), которую отсканировала планка 4, сразу же сканировалась планкой 5.
Благодаря наклону планки 5 относительно фокальной плоскости 3 каждый пиксель вдоль планки «видит» разную фокусировку, меняющуюся от -dmax до +dmax. Параметр dmax является увеличением возможной расфокусировки, когда планки находятся в наилучшей плоскости фокусировки прибора.
Если устройство расфокусировано с неизвестной расфокусировкой d0, то в этом случае светочувствительная матрица номинальной планки расфокусирована на d0,
Вдоль наклонной планки расфокусировка меняется от d0-dmax до d0+dmax, и расфокусировка пикселя i в этом случае будет составлять di=d0+i*dmax/imax (при предположении, что индекс i меняется от -imax до +imax).
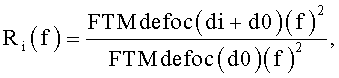
Наклонная и номинальная планки являются параллельными и, следовательно, наблюдают один и тот же пейзаж с учетом временного смещения, связанного со смещением планок на Y в зависимости от скорости прохождения (в режиме съемки “push-broom”). Соотношение Ri(f) между DSP (спектральная плотность мощности, вычисляемая при помощи известного способа) изображения, полученного при помощи наклонной планки, и DSP изображения, полученного при помощи номинальной матрицы для данного столбца i на пространственной частоте f в изображениях (при этом указанные DSP изображений корректируют при помощи оценки DSP шума при получении изображения, вычисляемой известным способом), будет составлять:

где FTMdefoc(d)(f) является функцией перехода модуляции устройства на рассматриваемой пространственной частоте f и при расфокусировке d, то есть она характеризует расплывчатость полученного изображения, di является относительной расфокусировкой пикселя или столбца пикселей ряда i наклонного датчика по отношению к номинальному датчику, которая является линейной функцией i*sinus α согласно выражению: di=i*ширина пикселя на наклонной планке * sinus α (где i отсчитывают от центра наклонной планки, то есть он имеет такую же расфокусировку, что и номинальная планка), и DSPpci(f) является DSP участка пейзажа, наблюдаемого столбцом i на пространственной частоте f. Поскольку DSP пейзажа столбца i находится в числителе и в знаменателе, ее из Ri исключают и не используют.
Это соотношение будет максимальным для столбца 10 наилучшей фокусировки, и из него выводят значение расфокусировки прибора do=di0 (di0 является относительной расфокусировкой столбца i0 на наклонном датчике). Таким образом, поиск максимального значения Ri(f) приводит непосредственно к расфокусировке d0 устройства.
Это рассуждение имеет силу для любой частоты f. Поскольку расфокусировка оказывает влияние при FTM на высоких частотах, можно выбрать f или вычислить соотношение в частотном диапазоне (fa, fb), близком к получастоте дискретизации. Следует отметить, что поскольку DSP шума детектора и свертывание спектра могут исказить измерение Ri, то получастота дискретизации не всегда является наилучшей возможной частотой анализа. Частотный диапазон анализа можно оптимизировать с учетом характеристик FTM оптики и шума детектора.
Разумеется, способ можно адаптировать, считая, что расфокусировка является практически постоянной на смежных группах пикселей наклонной планки. В этом случае используют DSP каждой группы столбцов.
Следует отметить, что рассматриваемые длины планок могут быть очень большими (несколько тысяч пикселей), что повышает точность метода.
Согласно варианту осуществления изобретения, если, как схематично показано на фиг. 3, оптоэлектронный датчик содержит номинальную прямоугольную матрицу оптоэлектронных чувствительных элементов, то параллельно ей располагают другую прямоугольную матрицу 8 (идентичную или не идентичную), имеющую такой же наклон, что и планка 5 по отношению к планке 4.
Согласно другому варианту изобретения, применяют способ, называемый «диверсификацией фаз», для каждой пары изображений одной сцены или одного объекта. Под парой изображений следует понимать изображение, получаемое при помощи наклонной планки, и соответствующее изображение (этого же объекта или зоны пейзажа), получаемое при помощи номинальной планки (плоское), расфокусированных практически на постоянное значение внутри каждого изображения, если только угол α является достаточно малым, но с разными расфокусировками между парами в зависимости от положения изображения на наклонном датчике, и, благодаря эффекту усреднения или взвешенного усреднения результатов применения алгоритмов измерения оптических аберраций известного метода диверсификации фаз достигают существенного повышения точности конечных результатов этого метода «диверсификации фаз». Предпочтительно изображения являются картинками со стороной в несколько десятков пикселей, например 150 пикселей. На этих 150 пикселях расфокусировка может быт постоянной (что соответствует истине, если угол α является небольшим). В этом случае получают (N/150) разных пар (где N = число пикселей планки). Можно взять меньшее число пар, при этом выбор делают, в частности, согласно критерию, зависящему от градиента пейзажа внутри каждого изображения, чтобы убрать почти однородные изображения или их отсортировать, чтобы выбрать, например, половину от их числа. Из каждой пары диверсификация фаз позволяет выделить низкочастотные аберрации оптики: расфокусировка, кома, астигматизм и т.д. Выводят среднее значение из М результатов (М=N/(150*2), чтобы повысить точность этих аберраций, что позволяет получить точное измерение.
В описанных выше вариантах выполнения необходимо уметь связать объект, наблюдаемый номинальной планкой, с тем же объектом, наблюдаемым наклонной планкой. Это значит, что необходимо установить соответствие на субпиксельном уровне между двумя изображениями. Однако, если обе планки значительно удалены друг от друга, могут произойти геометрические искажения, в частности, связанные с отклонениями SCAO (система контроля пространственной ориентации и орбиты) и с микровибрациями, которые могут привести к рассогласованию изображений (то есть они не накладываются друг на друга при некоторых конфигурациях платформы). Эту проблему классически решают, с одной стороны:
- либо путем моделирования искажений между двумя изображениями при помощи бортовой инструментальной модели (в частности, с использованием измерений SCAO, если они являются достаточно точными),
- либо путем моделирования непосредственно от изображения к изображению путем корреляций изображений, на основании которых строят модель соответствия (хорошо известную в области обработки изображений),
и, с другой стороны, путем возможной повторной дискретизации пар изображений в той же геометрии с использованием интерполятора, наиболее адаптированного для сохранения DSP изображений.
Таким образом, путем простого добавления наклонной планки и нескольких вычислительных схем создают большое количество пар расфокусированных изображений (с разными дельтами расфокусировки), что позволяет получать очень хорошее разрешение для определения основных аберраций, затрагивающих общую для двух датчиков оптику.
Согласно предпочтительному отличительному признаку изобретения, устройство измерения применяют в устройстве коррекции вышеуказанных оптических дефектов (связанных, в частности, с термоупругими деформациями и с дегазацией), чтобы получить оптическое устройство с автоматической фокусировкой. В этом случае указанное устройство измерения интегрируют в контур автоматического отслеживания, содержащий, в частности, устройство (механическое, термическое или оптическое) компенсации деформаций, связанных с оптикой номинальной планки. Поскольку реализация такого устройства коррекции зависит от характеристик устройства, его детальное описание опускается.
Устройство развертывания и свертывания гибкой конструкции, гибкая развертываемая конструкция и спутник, оборудованные таким устройством
Способ и устройство определения потребности для системы автоматического пилотирования летательного аппарата
Способы передачи и приема данных между терминалом и шлюзом, в частности посредством спутниковой связи
Спутниковое приемно-передающее устройство с высоким коэффициентом ослабления многонаправленности, ретранслятор и спутник, оборудованные таким устройством
Система и способ для определения ошибки местоположения приемного устройства спутниковой локализации
Устройство и способ для содействия реконфигурации летательного аппарата, летательный аппарат, включающий в себя такое устройство
Устройство и способ усиления сигналов радиосвязи
Способ определения закона наведения для уклонения от препятствия летательным аппаратом, электронная система и летательный аппарат
Блок из двух антенн с двойными рефлекторами, установленных на общей опоре, и спутник, содержащий такой блок
Модульное электронное устройство для работы в суровых условиях
Дальнометрия малоразмерных целей с большой дальностью действия
Устройство развертывания и свертывания гибкой конструкции, гибкая развертываемая конструкция и спутник, оборудованные таким устройством

