СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖИВОТНЫХ
Вид РИД
Изобретение
Настоящее изобретение относится к способу определения местоположения животных с помощью радиоволн.
Известные системы для определения местоположения объектов, например животных, с помощью радиоволн содержат несколько радиопередатчиков и/или радиоприемников на известных позициях и соответствующий радиопередатчик и/или радиоприемник на каждом объекте, местоположение которого следует определить.
Далее передатчики и приемники, используемые для определения местоположения с помощью радиоволн, называются просто "узлы". В соответствии с часто используемым способом для того, чтобы установить положение узла, закрепленного на животном, местоположение которого следует определить, на первом этапе используются радиосигналы для измерения длины, на которую отличаются друг от друга расстояния между отдельными узлами с известным местоположением и узлом, местоположение которого следует определить. С этой целью, например, сигнал одновременно передается на все остальные узлы из узла, местоположение которого следует определить. Принимающие узлы измеряют время, на которое этот сигнал поступает к ним. Разницу между отдельными измеренными значениями времени, умножают на скорость света (скорость распространения сигнала в соответствующей среде), что дает в результате разницу в расстоянии между отдельными узлами и передающим узлом. Для дальнейших вычислений, предполагается, на первом этапе, что узел, местоположение которого следует определить, находится на гиперболоиде, ось которого проходит через два узла с известным местоположением в качестве фокальных точек, при этом измеренная разница в расстоянии между этими узлами и узлом, местоположение которого следует определить, будет равна той длине, на которую - по определению - отличаются расстояния между двумя фокальными точками и каждой точкой гиперболоида. Возможное расположение устройства, местоположение которого следует определить, ограничено до двух точек в результате, по меньшей мере трех таких пересечений гиперболоидов. На дальнейшее ограничение до одной точки может повлиять четвертый гиперболоид (в результате чего потребуется по меньшей мере четыре узла с известным местоположением), или вследствие того, что одна точка может быть исключена в любом случае на основе известных геометрических условий, например, потому что указанная точка находится за пределами помещения, внутри которого животные могут перемещаться. (В этом документе "гиперболоид" используется для обозначения осесимметричной области в форме оболочки, которую можно рассматривать как произведенную вращением гиперболы вокруг своей основной оси.)
Если в модификации описанного способа радиоволны используются на первом этапе для непосредственного определения расстояния между узлом на животном, местоположение которого следует определить и отдельными узлами с известным местоположением, на второй стадии можно допустить вместо оболочек гиперболоида сферические оболочки.
В упрощенной дальнейшей модификации описанного способа радиоволны используются для измерения только одного расстояния, а именно расстояния между одним узлом с известным местоположением и узлом, местоположение которого следует определить. Результатом является затем точно указанное расстояние между двумя узлами или, если известно, что узел, местоположение которого следует определить, может быть только на известной линии так или иначе из-за конструкционных условий, расположение, возникающее в результате линии пересечения известной линии с этой сферой, радиус которой равен измеренному расстоянию между двумя узлами, а центральная точка которой находится на узле с известным местоположением.
В документах AT 506628 A1, US 6122960 A, DE 10045469 C2, WO 9941723 A1, WO 2011153571 A2 и WO 2012079107 A2, например, рассмотрено определение местоположения животных с помощью радиоволн в соответствии с изложенными принципами.
По причине значительных погрешностей измерений и неточностей измерений, которые зачастую неизбежны на практике - например, за счет отражений радиоволн необходимо ввести дополнительно логические предположения и провести соответствующие оценки для того, чтобы иметь возможность получить достаточно достоверный результат определения местоположения. В дополнение к уже упомянутой практике исключающих результатов, которые невозможны по причине геометрических условий, используются стохастические способы, в частности, также для ограничения неоднозначности соответствующего текущего результата (результатов) на основании результатов предшествующих измерений и для определения такого результата измерения, который отражает действительность с наименьшей вероятностью ошибок. Испытанной стохастической моделью является скрытая модель Маркова в данном контексте, и, в частности, алгоритм Витерби, который может быть использован для определения в настоящее время наиболее вероятной последовательности состояний в каждом конкретном случае из множества возможных последовательностей состояний относительно эффективным образом. Например, в документе ЕР 1494397 А2 описан такой способ, в частности, для использования радиоволн при определении местоположения в помещениях, что особенно трудно по причине неоднократно возникающих отражений сигнала.
В документах ЕР 549081 A1, GB 2234070 A, GB 2278198 А, US 3999611 A, US 6122960 A, US 7616124 В2, WO 2002091001 A1, WO 2003055388 А2, WO 2006077589 А2, WO 2010108496 А1 и WO 2010109313 А1, например, предлагается и объясняется способ закрепления датчиков ускорения (помимо прочего) на живых животным и использования результатов измерений от датчиков ускорения для определения поведения животных, которое приводит к соответствующим ускорениям. С этой целью результаты измерений, как правило, передаются в систему обработки данных с помощью радиосвязи и проверяются упомянутой системой обработки данных на соответствие временным профилям данных ускорения, сохраненных в качестве образцов.
В этом случае временные профили, сохраненные в виде образцов, характеризуют определенные виды активности животного, например, ходьбу, питание, жевание, сон, возможно, ходьбу с хромотой, взбирание на других животных. С целью определения характерных образцов в предыдущей работе были зафиксированы данные ускорения и параллельно с этим, виды активности животных, определенные на основе непосредственного наблюдения, и из зарегистрированных данных была вычленена взаимосвязь между образцами ускорения и видами деятельности.
Также возможно еще оценить данные измерения ускорения полностью или частично в системе обработки данных, находящейся на этом устройстве, которое находится на животном, и содержит датчик (датчики) ускорения.
В документе WO 9941723 А1 рассмотрено устройство, которое носит человек или животное, и которое может передавать и принимать радиоволны, и местоположение которого может быть определено с помощью спутниковой навигационной системы. Также отмечается, что, в дополнение к различным другим датчикам, которые могут измерять биологическое состояние, например, устройство может также содержать датчик ускорения.
В документах WO 2011153571 А2 и WO 2012079107 А2 рассмотрены беспроводные ушные бирки для животных, ушная бирка позволяет как определять местоположение с помощью радиоволн, так и может содержать датчик ускорения, который можно использовать для автоматической идентификации вида активности животного путем оценки образца.
В документе US 6122960 А рассмотрено преимущественно измерение и запись перемещений и расстояний, покрываемых людьми или животными, за счет измерения ускорений и оценки результатов измерений. Дополнительно предлагается определить "абсолютное местоположение" с помощью радионавигации.
На основании этого предыдущего уровня техники, целью настоящего изобретения является обеспечение способа определения местоположения животных с помощью радиоволн, способ применения которых может быть использован и применен автоматически в загонах и вольерах для животных, и обеспечивает более точные и более надежные результаты по сравнению с такими известными способами с точки зрения инвестиционных затрат, необходимых для этой цели.
Для достижения указанной цели предлагается объединить определение местоположения с помощью радиоволн и анализ данных по меньшей мере от одного датчика ускорения следующим новым способом:
Данные от датчика ускорения используются для определения, находится ли соответствующее животное в вертикальном (стоит, идет или бежит) положении или в положении лежа. В зависимости от этого решения, можно сделать вывод о том, на какой высоте от земли находится узел, который размещен на животном, и использовать для определения местоположения с помощью радиоволн. Информация, относящаяся к местоположению по высоте узла, местоположение которого следует определить, может быть внесена в качестве ограничивающего условия, при котором расчет должен выполняться во время определения местоположения с помощью радиоволн, и в соответствии с которым положение узла, местоположение которого следует определить, вычисляется по результатам одного или нескольких измерений расстояний или измерений разности расстояний между узлом, закрепленным на животном, и одним или несколькими узлами с известным местоположением.
Допустим, что ограничивающее условие, при котором узел, местоположение которого следует определить, находится в определенной области, уже приводит к вычислению, которое необходимо при определении местоположения с помощью радиоволн для обнаружения координат места, в котором этот узел расположен, является весьма упрощенным по сравнению с условиями без такого ограничивающего условия. Узел с известным местоположением является менее эффективным.
Поскольку согласно результатам оценки измерений ускорения, по-прежнему возможно четко указать, в какой из двух различных четко определенных областей узел, местоположение которого следует определить, должен располагаться, то, естественно, возможно достичь намного лучшей точности, чем если бы вместо этого было использовано только усредненное значение "средняя область" и в таком случае будет неизвестно, является ли узел, местоположение которого следует определить, на самом деле несколько выше или ниже этого. Очень важные преимущества способа в соответствии с настоящим изобретением проявляются, когда заслоняющие объекты, такие как стены или другие животные присутствуют в области, в которой может быть узел, местоположение которого следует определить. В способе согласно настоящему изобретению, благодаря знанию высоты, на которой расположен узел, местоположение которого следует определить, существует возможность очень правильно выборочно установить, заслонен или нет этот узел от прямого визуального контакта с конкретными узлами с известным местоположением. Поэтому в дальнейшем можно очень правильно выборочно установить, могут ли быть одновременно включены в расчет результаты от соответствующего узла с известным положением.
Настоящее изобретение иллюстрируется с помощью эскизных чертежей:
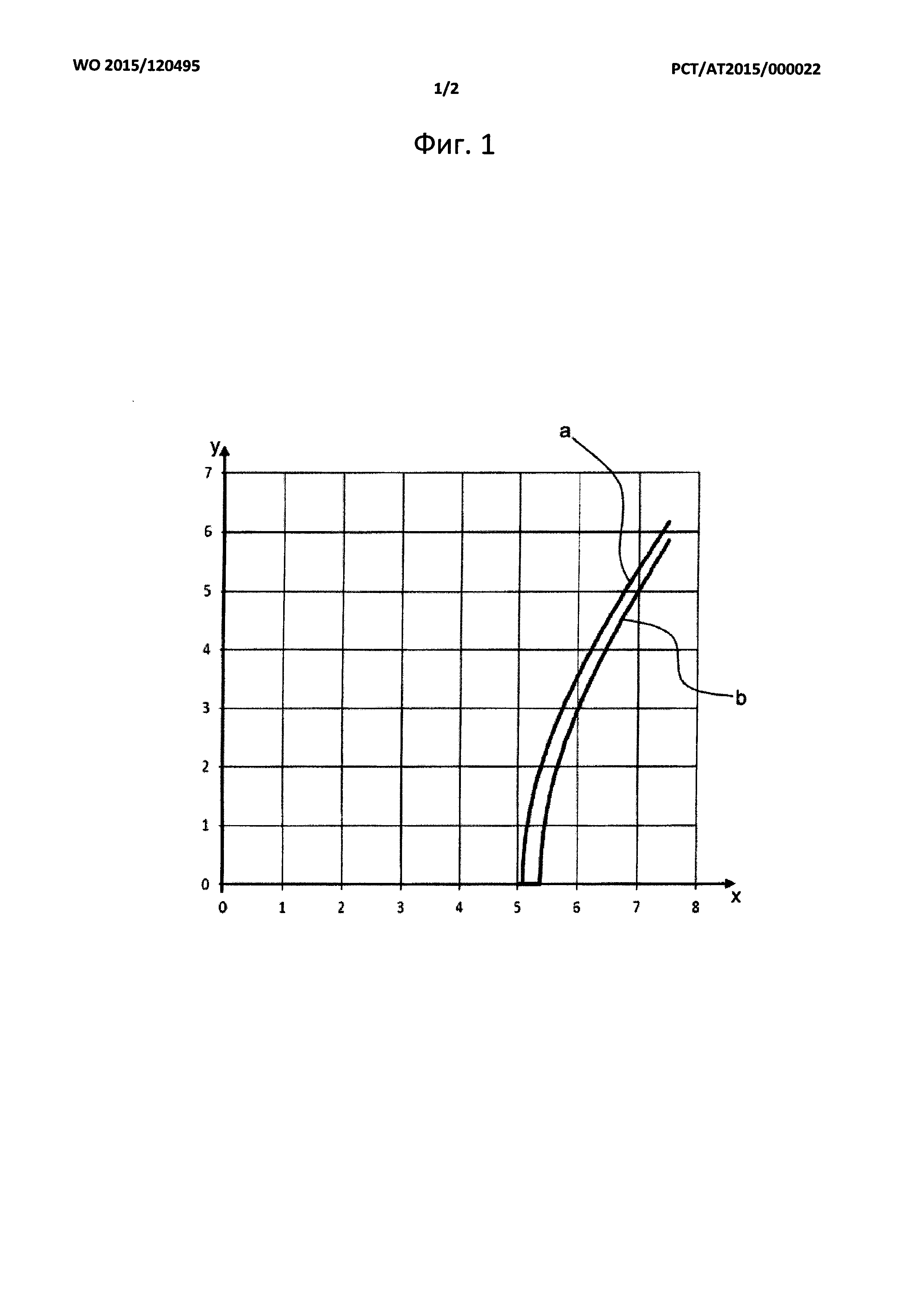
фиг. 1: вид сверху линий пересечения гиперболоида, ось которого проходит параллельно оси X, с двумя плоскостями, параллельными плоскости xy на различных высотах.
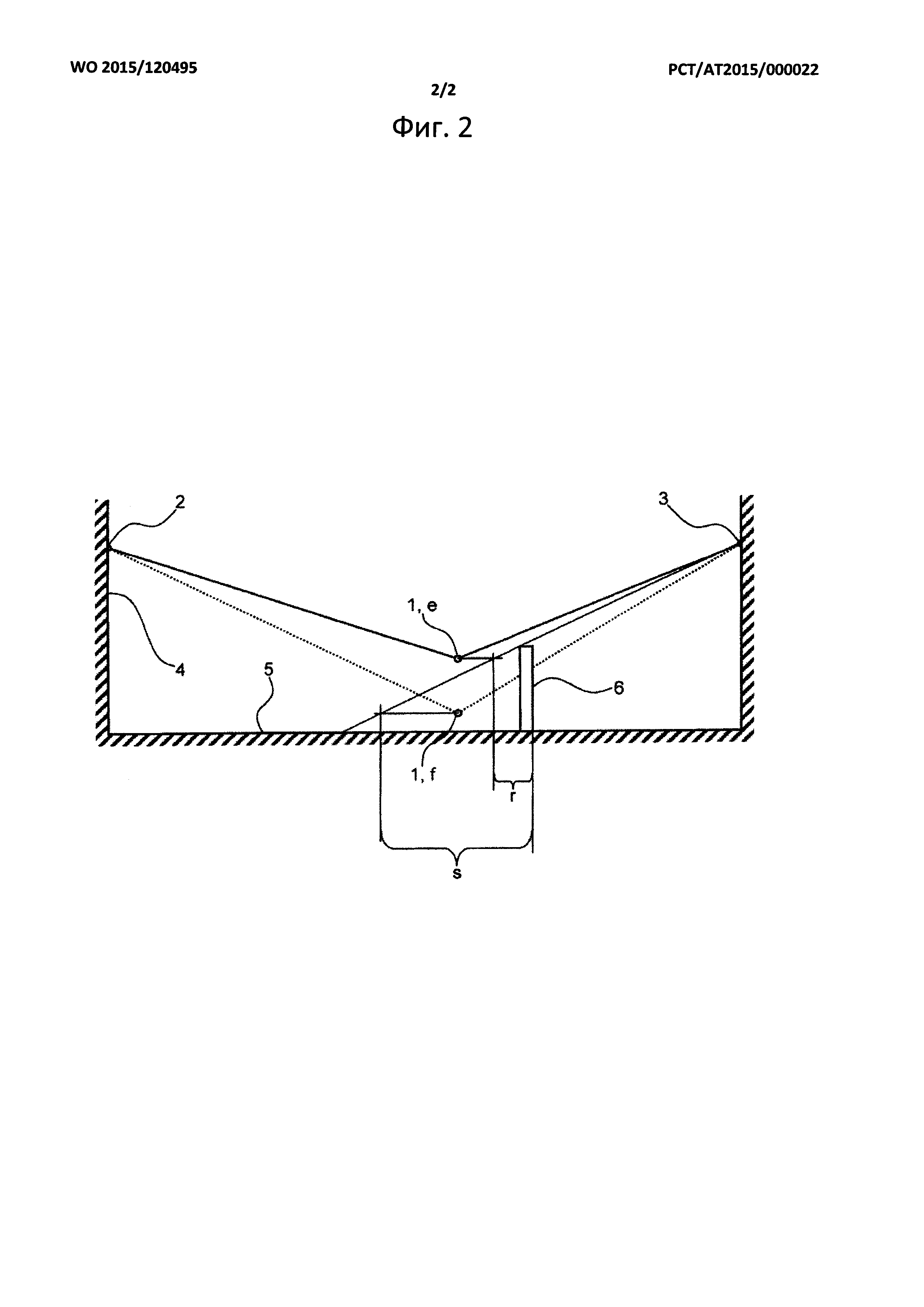
фиг. 2: вид сбоку геометрических соотношений в иллюстративном пространстве, в котором применяется настоящее изобретение.
Каждая из кривых а, b, показанных на фиг. 1, является отрезком линии пересечения одного гиперболоида с двумя различными плоскостями, параллельными плоскости ху. Допустим, единицей длины является метр, фокальные точки гиперболоида находятся в 15 метрах друг от друга, на прямой линии, параллельной оси х, с х координатами от -7,5 до +7,5, а разница в расстояния двух фокальных точек по отношению к каждой точке гиперболоида составляет 10 метров. Плоскость сечения, что проходит к кривой а на один метр ниже соединительной линии между фокальными точками. Плоскость сечения, что проходит к кривой b на 2,2 метра ниже соединительной линии между фокальными точками.
Кривые а, b, следовательно, отражают идеальные условия, если
- узел системы определения местоположения с помощью радиоволн соответственно закреплен на стенах, которые находятся на расстоянии 15 метров друг от друга на высоте 2,5 метра в помещении, и
- скот находится в помещении, в этом случае узел, местоположение которого следует определить, представляет собой ушную бирку и находится на высоте 1,5 метра, если корова стоит или ходит, и находится на высоте 0,3 метра, если корова лежит или ест с пола, и
- расстояние между ушной биркой коровы и одним узлом на 10 метров больше, чем расстояние от другого узла, и
- используемым принципом определения местоположения с помощью радиоволн является принцип измерения разницы между временем распространения сигнала между узлом, местоположение которого следует определить, и различными узлами с известным местоположением.
Что касается координат ху, нормальное расстояние между двумя кривыми сечения a, b составляет приблизительно только 1/3 метра и поэтому не имеет существенного значения на первый взгляд. Тем не менее, легко увидеть, что, в нормальном состоянии до соединительной линии между фокальными точками гиперболоида, то есть в нормальном состоянии до соединительной линии между двумя узлами с известным местоположением, расстояние между двумя кривыми a, b может составлять приблизительно два метра, если узел, местоположение которого следует определить, будет расположен в непосредственной близости от соединительной линии между узлами с известным местоположением.
Согласно настоящему изобретению применение одной определенной кривой из двух различных кривых а, b, вместо одной "усредненной кривой" (которая предположительно находится посередине между кривыми а, b), таким образом, значительно повышает точность измерения по отношению к координате у, в то время как улучшение точности измерения по отношению к координате х (которая параллельна соединительной линии между узлами с известным местоположением) является лишь незначительным.
Возможно, наиболее важное преимущество способа согласно настоящему изобретению объясняется с помощью фиг. 2.
Животные, которые имеют узлы 1, местоположение которых следует определить, как правило, в виде ушной бирки, находятся на огороженной территории, например, в загоне, который обозначен боковыми стенками 4 и полом 5. Узлы 2, 3 системы определения местоположения с помощью радиоволн закреплены в известных местоположениях на боковых стенках. Объект 6, который заслоняет некоторые области r, s пространства над полом 5 огороженной территории по отношению к узлу 3, находится на огороженной территории, таким образом отсутствует прямой визуальный контакт с узлом 3 из этих областей пространства. Заслоняющим объектом может быть, например, разделительная стенка, подающее устройство или еще другое животное, местоположение которого было определено с помощью радиоволн.
Как известно само по себе, при логическом оценивании результатов определения местоположения с помощью радиоволн, которые неоднозначны сами по себе, принимается во внимание, может или нет узел 1, местоположение которого следует определить, быть на самом деле расположен в месте, очевидно вытекающем из расчета. Кроме того, если доступна необходимая основная информация, результаты вычислений, в которые были одновременно включены результаты измерения из узла 3, исключаются как недействительные, если в них установлено, что узел 1, местоположение которого следует определить, находится в области s пространства, из которого полностью отсутствует прямой визуальный контакт с узлом 3 с известным местоположением. Это происходит потому, что измеренное время распространения сигнала, на котором основано вычисление, затем не может отражать расстояние между узлами 1 и 3 на прямой вытянутой линии.
Поскольку высота, на которой должен быть расположен узел 1, местоположение которого следует определить, уже принята, согласно настоящему изобретению, в качестве ограничивающего условия для вычисления местоположения, существенно отличающиеся области s, r пространства, которые заслонены от узла 3 объектом 6, приводят к вычислению в зависимости от ситуации (меньшей или большей из двух возможных высот).
Если вычисление с использованием результатов обнаружения местоположения с помощью радиоволн показывает, что узел 1, местоположение которого следует определить, находится в области s, r, заслоненной по отношению к узлу 3 и, если измеренные значения от узла 3, одновременно включены в этот расчет, соответствующий результат вычисления может быть классифицирован как недействительный, то есть не может рассматриваться в дальнейшем для последующей оценки.
В примере, показанном на фиг. 2, результат вычисления, который одновременно включает в себя узел 3 может быть обработан далее в качестве возможного результата, если известно, на основании оценки результатов измерений ускорения, что узел 1, местоположение которого следует определить, должен находиться в более высоком положении, что приводит к точке е, как к вычисленному местонахождению. В противоположность этому, результат вычисления, который одновременно включает в себя результат измерения от узла 3, может быть классифицирован как заведомо недействительный в отношении дальнейшей оценки, если известно, на основании оценки результатов измерений ускорения, что узел 1 местоположение которого следует определить, должен находиться в нижнем положении, что приводит к точке f, как к вычисленному местонахождению, так как точка f в области s пространства заслонена от узла 3 объектом 6.
Способ согласно настоящему изобретению можно применять для самых разнообразных животных. На практике применение на крупном рогатом скоте и свиньях, вероятно, является наиболее показательным. Для каждого вида животных и, возможно, также индивидуально для каждого отдельного животного, необходимо проверить и предусмотреть для вычислений, на какой высоте над полом находится узел, размещенный на животном, и в течение какого вида активности животного скорее всего, будет находиться. Если в ходе оценки ускорения могут быть определены более двух различных видов активности животного, также могут быть определены более двух возможных высот при определенных условиях, в каком случае отдельная высота соответственно назначена отдельному виду активности (стояние, "сидение", лежание, лежа с поднятой головой, лежа с головой на полу и т.д.). Одна правильная высота в каждом случае может быть выбрана из более чем двух возможных высот в качестве ограничивающего условия для вычисления положения по радиолокации.
Особенно простой результат вычислений, если пол 5 представляет собой плоскую поверхность и, если все узлы 2, 3 с известным местоположением находятся на той же высоте над полом 5.
Сеть данных для отслеживания животных
Способ определения местоположения животных с использованием радиоволн
Ушная бирка для животных
Способ получения информации о сельскохозяйственном животном
Сеть данных для отслеживания животных
Способ определения местоположения животных с использованием радиоволн
Ушная бирка для животных
Способ получения информации о сельскохозяйственном животном

