СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ НОМЕРА КОНТЕЙНЕРА
Вид РИД
Изобретение
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники
Варианты осуществления настоящего раскрытия относятся к определению контейнера и, в частности, к способу идентификации номера контейнера и системе идентификации номера контейнера.
Описание известного уровня техники
Существующие системы получения и идентификации номера контейнера включают ручное устройство для получения изображения номера контейнера и извлечения цифр номера из этого изображения вручную, и устройство, установленное на однонаправленном маршруте контейнеровоза и автоматически получающее изображение номера контейнера и извлекающее из этого изображения цифры номера.
Для устройства, установленного на однонаправленном маршруте контейнеровоза и автоматически получающего изображение номера контейнера и извлекающего из этого изображения цифры номера, если номер контейнера загрязнен или поврежден, или является неполным, часто тяжело получить правильный номер контейнера только посредством единоразового выполнения операции автоматического получения изображения номера контейнера (т.e. одной операции считывания) на одной поверхности контейнера.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение было выполнено для повышения точности идентификации номера контейнера и устранения или уменьшения проблемы сложности считывания номера контейнера, возникающей вследствие того, что номер контейнера на поверхности, соответствующей блоку получения изображения, загрязнен или поврежден или является неполным.
Согласно одному аспекту вариантов осуществления настоящего изобретения предоставлен способ идентификации номера контейнера, включающий следующие этапы:
расположение устройства получения изображения вдоль маршрута, по которому будет проходить контейнер, при этом устройство получения изображения содержит триггерный блок и множество блоков получения изображения, при этом по меньшей мере два блока получения изображения из множества блоков получения изображения предусмотрены соответственно для получения изображений номеров контейнеров по меньшей мере на двух поверхностях из множества поверхностей контейнера, проходящего по указанному маршруту;
получение изображений номеров контейнера по меньшей мере на двух поверхностях, соответственно по меньшей мере двумя блоками получения изображения на основе сигнала от триггерного блока; и
идентификация номера контейнера по меньшей мере на основе изображений или данных от по меньшей мере двух блоков получения изображения в отношении номера контейнера.
Опционно, изображения номеров контейнера по меньшей мере на двух поверхностях из указанного множества поверхностей, соответственно, получают посредством по меньшей мере двух блоков получения изображения из множества блоков получения изображения в разные моменты времени на основе сигнала от триггерного блока, и при этом расстояние между проекциями по меньшей мере двух блоков получения изображения в направлении движения контейнера относительно указанного маршрута меньше длины контейнера.
Дополнительно, по меньшей мере два блока получения изображения расположены таким образом, чтобы относительное положение каждого из указанных по меньшей мере двух блоков получения изображения относительно соответствующей одной из поверхностей контейнера было постоянным в двух противоположных направлениях движения контейнера относительно указанного маршрута при получении изображения номера контейнера на соответствующей поверхности.
Согласно другому аспекту вариантов осуществления настоящего изобретения предоставлен способ идентификации номера контейнера, включающий:
устройство получения изображения, расположенное вдоль маршрута, по которому будет проходить контейнер, при этом устройство получения изображения содержит триггерный блок и множество блоков получения изображения, при этом по меньшей мере два блока получения изображения из множества блоков получения изображения предусмотрены соответственно для получения изображений номеров контейнеров по меньшей мере на двух поверхностях из множества поверхностей контейнера, проходящего по указанному маршруту; и
устройство идентификации номера, сконфигурированное для идентификации номера контейнера по меньшей мере на основе изображений или данных от по меньшей мере двух блоков получения изображения в отношении номера контейнера, при этом
расстояние между проекциями по меньшей мере двух блоков получения изображения в направлении движения контейнера относительно указанного маршрута меньше длины контейнера.
Дополнительно, относительное положение каждого из указанных по меньшей мере двух блоков получения изображения относительно соответствующей одной из поверхностей контейнера закреплено в двух противоположных направлениях движения при получении изображения номера контейнера на соответствующей поверхности.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Вышеуказанные и прочие характеристики и преимущества настоящего изобретения могут быть более понятны из следующих предпочтительных вариантов осуществления, описанных со ссылкой на сопроводительные графические материалы. На графических материалах:
Фиг. 1 - блок-схема способа получения номера контейнера согласно одному варианту осуществления настоящего раскрытия;
Фиг. 2 - схематический вид сверху расположения системы получения номера контейнера согласно первому примеру варианта осуществления настоящего раскрытия;
Фиг. 3a и Фиг. 3b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 2;
Фиг. 4 - схематический вид сверху расположения системы получения номера контейнера согласно второму примеру варианта осуществления настоящего раскрытия;
Фиг. 5a и Фиг. 5b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 4;
Фиг. 6 - схематический вид сверху расположения системы получения номера контейнера согласно третьему примеру варианта осуществления настоящего раскрытия;
Фиг. 7a-d - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 6;
Фиг. 8 - схематический вид сверху расположения системы получения номера контейнера согласно четвертому примеру варианта осуществления настоящего раскрытия;
Фиг. 9a-d - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 8;
Фиг. 10 - схематический вид сверху расположения системы получения номера контейнера согласно пятому примеру варианта осуществления настоящего раскрытия;
Фиг. 11a и Фиг. 11b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 10;
Фиг. 12 - схематический вид сверху расположения системы получения номера контейнера согласно шестому примеру варианта осуществления настоящего раскрытия;
Фиг. 13a-c - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 12;
Фиг. 14 - схематический вид сверху расположения системы получения номера контейнера согласно седьмому примеру варианта осуществления настоящего раскрытия;
Фиг. 15a-c - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 14;
Фиг. 16a - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера согласно восьмому примеру варианта осуществления настоящего раскрытия; Фиг. 16b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера согласно вариации восьмого примера варианта осуществления настоящего раскрытия;
Фиг. 17 - схематический вид сверху расположения системы получения номера контейнера согласно девятому примеру варианта осуществления настоящего раскрытия;
Фиг. 18a и Фиг. 18b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 17;
Фиг. 19 - схематический вид сверху устройства системы получения номера контейнера согласно десятому примеру варианта осуществления настоящего раскрытия;
Фиг. 20 - схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 19, при этом верхняя часть Фиг. 20 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и время считывания системы получения номера контейнера, а нижняя часть Фиг. 20 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 19;
Фиг. 21 - еще одно схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 19, при этом верхняя часть Фиг. 21 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и время считывания системы получения номера контейнера, а нижняя часть Фиг. 21 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 19;
Фиг. 22 - схематический вид сверху расположения системы получения номера контейнера согласно одиннадцатому примеру варианта осуществления настоящего раскрытия;
Фиг. 23 - схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 22, при этом верхняя часть Фиг. 23 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и время считывания системы получения номера контейнера, а нижняя часть Фиг. 23 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 22; и
Фиг. 24 - еще одно схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 22, при этом верхняя часть Фиг. 24 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и время считывания системы получения номера контейнера, а нижняя часть Фиг. 24 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 22.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Несмотря на то, что настоящее раскрытие будет в достаточной степени описано со ссылкой на прилагаемые графические материалы, содержащие предпочтительные варианты осуществления настоящего раскрытия, специалистам в данной области техники будет понятно, что в этих вариантах осуществления могут быть выполнены различные изменения и модификации, не выходящие за рамки сути и объема изобретения, и при этом оказывающие благоприятное влияние на настоящее раскрытие. Будет понятно, что описание иллюстративных вариантов осуществления настоящего раскрытия, выполненное со ссылкой на прилагаемые графические материалы предназначено для иллюстрации общих принципов настоящего изобретения и не должно быть истолковано, как ограничивающее настоящее раскрытие.
Фиг. 1 - блок-схема способа получения номера контейнера согласно одному варианту осуществления настоящего раскрытия. Как показано на Фиг. 1, способ получения номера контейнера, включает следующие этапы:
S1: расположение устройства получения изображения вдоль маршрута, по которому будет проходить контейнер, при этом устройство получения изображения содержит триггерный блок и множество блоков получения изображения, при этом множество блоков получения изображения предусмотрены соответственно для получения изображений номеров контейнеров на множестве поверхностей контейнера, проходящего по указанному маршруту;
S2: получение изображений номеров контейнера по меньшей мере на двух поверхностях, соответственно по меньшей мере двумя блоками получения изображения на основе сигнала от триггерного блока; и
S3: идентификация номера контейнера по меньшей мере на основе изображений или данных от по меньшей мере двух блоков получения изображения в отношении номера контейнера.
Как таковые, изображения номеров контейнера по меньшей мере на двух поверхностях контейнера получают посредством блоков получения изображения на основе сигнала триггера от триггерного блока, и цифры номера контейнера извлекают из одного или более полученных изображений посредством алгоритма распознания цифр. Изображения номера контейнера для одного и того же контейнера, считанные устройством получения изображения получают в различных положениях и под различным углом относительно контейнера, результаты распознания, соответственно, получают из изображения посредством алгоритма распознания цифр, затем происходит подтверждение результатов для получения результата с максимальной точностью. Как известно, на всех поверхностях контейнера имеется один и тот же номер контейнера, то есть, даже если номер контейнера на одной поверхности не может быть полностью идентифицирован вследствие его загрязнения, повреждения, блокировки или неполной видимости, идентификация может быть достигнута на основе полного номера контейнера на другой поверхности, или посредством рассмотрения и сопоставления номеров контейнера по меньшей мере на двух поверхностях (например, различные части номеров на двух поверхностях загрязнены или повреждены, то есть, часть номера на первой поверхности загрязнена или повреждена, тогда как эта же часть номера на другой поверхности видна полностью, таким образом, полный номер может быть получен замещением загрязненной или поврежденной части номера на одной поверхности соответствующей частью номера на другой поверхности). Следовательно, таким образом, номер контейнера для указанного контейнера может быть с точностью получен в случае, когда контейнер однократно проходит по маршруту, то есть, точность результата распознания может быть повышена путем получения изображений номеров в разных положениях одного и того же контейнера.
Согласно требованиям ISO 6346:1995 «код контейнера, идентификация и стандарт маркировки», номер контейнера состоит из основного кода позиции, идентификационного кода устройства, номера позиции и контрольного кода. Упоминаемый в настоящем описании номер контейнера включает по меньшей мере основной код позиции, идентификационный кода устройства, номер позиции и контрольный код.
В способе согласно настоящему раскрытию изображения номеров контейнера на различных поверхностях контейнера могут быть получены последовательно, а не одновременно. В одном примере триггерный блок сконфигурирован для генерирования сигнала на основе относительного движения между контейнером и маршрутом, и изображения номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей получают, соответственно, по меньшей мере двумя блоками получения изображения из множества блоков получения изображения в различные моменты времени на основе сигнала от триггерного блока. В этом случае расстояние между проекциями по меньшей мере двух блоков получения изображения в направлении движения контейнера относительно указанного маршрута меньше длины контейнера. Дополнительно, расстояние между проекциями по меньшей мере двух блоков получения изображения в направлении движения контейнера относительно маршрута (то есть, в направлении маршрута) меньше длины (20 футов, приблизительно 6 метров) стандартного короткого контейнера и может быть задано меньшим, чем длина (40 или 45 футов) длинного контейнера. Поскольку расстояние между блоками получения изображения в направлении движения меньше, чем длина контейнера, длина маршрута может быть установлена меньшей, чем длина контейнера, экономя, таким образом место установки.
Будет понятно, что в настоящем раскрытии маршрут, по которому проходит контейнер, может быть неизменным маршрутом проверки, по которому контейнер перемещается устройством для транспортировки контейнера, таким как контейнеровоз, и вдоль которого установлено устройство получения изображения; альтернативно, маршрут, по которому проходит контейнер может быть маршрутом, обеспечиваемым или определяемым несущим транспортным средством, и по меньшей мере устройство получения изображения системы идентификации номера контейнера обеспечено на несущем транспортном средстве вдоль маршрута, при этом контейнер удерживается неподвижно, когда несущее транспортное средство проносит устройство получения изображения, перемещая его относительно контейнера, так, чтобы контейнер проходил по маршруту, обеспечиваемому или определяемому несущим транспортным средством, таким образом могут быть получены изображения номеров контейнера на разных поверхностях контейнера.
Дополнительно, в вышеуказанном способе опционно по меньшей мере два блока получения изображения расположены таким образом, чтобы отношение относительного положения между каждым из указанных по меньшей мере двух блоков получения изображения и соответствующей одной из поверхностей контейнера было постоянным в двух противоположных направлениях движения контейнера относительно указанного маршрута при получении изображения номера контейнера на соответствующей поверхности. Иными словами, независимо от направления, в котором контейнер проходит по маршруту, относительные положения между видеокамерой и контейнером являются постоянными при считывании номера контейнера в одном и том же положении, так что приближения и настройки других параметров видеокамеры не требуются, когда контейнер проходит в прямом или обратном направлении.
Например, как показано на Фиг. 5, когда контейнер A заходит на маршрут слева направо на Фиг. 5a, изображение участка, на котором содержится номер контейнера, передней поверхности A1 контейнера считывается первым 11 блоком получения изображения; когда контейнер A заходит на маршрут справа налево на Фиг. 5b, например, изображение участка, на котором содержится номер контейнера, передней поверхности A1 контейнера все равно считывается первым блоком 11 получения изображения. Также, как показано на Фиг. 5, когда контейнер A заходит на маршрут слева направо на Фиг. 5a, линия сигнала второй группы датчиков, которая будет описана ниже, оказывается заблокированной, таким образом, что первый блок 11 получения изображения активируется для выполнения одной операции считывания; когда контейнер A заходит на маршрут справа налево на Фиг. 5b, линия сигнала второй группы датчиков восстанавливается, таким образом, что первый блок 11 получения изображения активируется для выполнения одной операции считывания. Во время операций считывания относительное положение первого блока 11 получения изображения остается постоянным относительно передней поверхности A1 контейнера при получении изображения номера контейнера на передней поверхности A1 контейнера. Приведенное выше описание также применимо к задней поверхности A2 и двум боковым поверхностям A3, A4 контейнера A.
Как таковое, настоящее раскрытие предоставляет двунаправленный саморегулирующийся способ получения изображения номера контейнера, в котором не имеет значение направление прохождения контейнера по маршруту, соответственно, фото участка контейнера, на который нанесено изображение с номером может быть получено отчетливо, позволяя, таким образом, получить номер контейнера. На основе номера контейнера способ согласно настоящему раскрытию позволяет определять типы и номера контейнеров, проходящих по маршруту, и позволяет получать коды размеров и коды типов контейнеров. При двунаправленном саморегулирующемся решении для получения номера контейнера, направление движения контейнера относительно маршрута не ограничено, то есть, направление перемещения контейнеровоза или несущего транспортного средства, содержащего устройства получения изображения, не ограничено.
Фиг. 2 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно первому примеру варианта осуществления настоящего раскрытия; и Фиг. 3a и Фиг. 3b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 2.
В примерах, показанных на Фиг. 2 и Фиг. 3a и 3b, триггерный блок содержит первую группу датчиков, содержащую первый участок 21a передатчика сигнала и первый участок 21b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения;
по меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения, предусмотренные, соответственно, для получения изображений номеров контейнера на передней поверхности и задней поверхности контейнера;
этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в различные моменты времени на основе сигнала от триггерного блока» включает: когда первая линия сигнала (показанная пунктирной линией на Фиг. 2 между первым участком 21a передатчика сигнала и первым участком 21b приема сигнала) первой группы датчиков оказывается заблокированной одной из передней поверхности A1 и задней поверхности A2 (на Фиг. 3A - передней поверхностью А1) контейнера A, как показано на Фиг. 3A, получение изображения номера контейнера на одной из передней поверхности и задней поверхности, соответственно, одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 3A - первым блоком 11 получения изображения); и когда другая из передней поверхности A1 и задней поверхности A2 контейнера A (на Фиг. 3B - задняя поверхность А2) выходит из первой линии сигнала первой группы датчиков, таким образом, что первая линия сигнала восстанавливается, как показано на Фиг. 3b, получение изображения номера контейнера на другой из передней поверхности и задней поверхности, соответственно, другим одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 3 - вторым блоком 12 получения изображения).
Опционно, в вариантах осуществления, показанных на Фиг. 2 и Фиг. 3a и 3b срединная точка линии соединения между первым блоком 11 получения изображения и вторым блоком 12 получения изображения является срединной точкой первой линии сигнала. Как таковые, первый и второй блоки получения изображения расположены симметрично относительно срединной точки. Такое симметричное расположение позволяет получить одинаковое или симметричное время считывания, так что блоки получения изображения, расположенные симметрично относительно друг друга, могут использовать один и тот же набор корректирующих параметров, снижая, таким образом загрузку, связанную с коррекцией изображений алгоритмом распознания цифр. В одном примере первый блок 11 получения изображения и второй блок 12 получения изображения считывают изображения на одном и том же расстоянии считывания и под одним и тем же углом обзора. Как таковые, положение считанной цифры в изображении и искажение цифры вследствие использования линз идентичны для двух блоков получения изображения. Для каждой искаженной цифры алгоритму изображения требуется набор корректирующих параметров для коррекции изображения цифры и последующего распознания цифры. Требуется применение корректирующих параметров для блоков получения изображения в различных положениях по очередности. Было обнаружено, что при использовании симметричного расположения корректирующие параметры, откалиброванные и сгенерированные одной камерой, могут использоваться для первого блока 11 получения изображения и второго блока 12 получения изображения, снижая, таким образом, загрузку на калибрование. В противном случае, при использовании асимметричного расположения требуется выполнение коррекции для всех блоков получения изображения, поскольку углы считывания и расстояния от соответствующих блоков получения изображения не совпадают между собой. Дополнительно, если моменты времени считывания не одинаковы или не симметричны относительно друг друга, когда контейнер проходит по маршруту в прямом и обратном направлениях, операции фокусирования при прохождении в прямом и обратном направлениях не идентичны друг другу, и, таким образом, требуется дополнительная операция автоматического фокусирования для блока получения изображения. Однако, времени для завершения операции автоматического фокусирования может быть недостаточно при прохождении контейнера на высокой скорости, что, таким образом, приводит к получению изображения не в фокусе.
В настоящем раскрытии тип датчика, в частности, не ограничен, в той степени, в которой датчик способен точно определять положение контейнера на маршруте. Обычно, в качестве датчика может применяться фотореле, то есть, участок передатчика сигнала и участок приема сигнала, соответственно, являются светопередающим участком и светопринимающим участком, и, соответственно, линия сигнала является линией прохождения светового луча. Датчик также может представлять собой ультразвуковой датчик, световую завесу, заземляющую индукционную катушку и тому подобное. В настоящем раскрытии, несмотря на то, что описано, что каждая группа датчиков обеспечена сигналом или содержит участок передатчика сигнала и участок приема сигнала, датчик также может быть рассеивающим датчиком, то есть не требующим участка передатчика сигнала, а содержащим только участок приема сигнала, для определения факта поступления контейнеровоза. Соответственно, каждая группа датчиков может содержать участок приема сигнала, расположенный на внутренней стороне маршрута. В настоящем раскрытии, в варианте осуществления, в котором предусмотрены, как участок передатчика сигнала, так и участок приема сигнала, блокировка или выход из линии сигнала означает блокировку или восстановление линии сигнала между участком передатчика сигнала и участком приема сигнала; в варианте осуществления, в котором предусмотрен только участок приема сигнала, блокировка или выход из линии сигнала означает, что участок приема сигнала не может принимать никакой сигнал, вследствие перемещения контейнера, или участок приема сигнала снова способен принимать сигнал. Приведенное выше описание также может быть применимо ко всем примерам вариантов осуществления настоящего раскрытия.
Фотореле будет описано в качестве примера в иллюстративных вариантах осуществления настоящего раскрытия.
В настоящем раскрытии блок получения изображения может представлять собой любой блок получения изображения, способный считывать изображение номера контейнера на поверхности контейнера и генерировать цифровой сигнал. Например, блок получения изображения является цифровой фотокамерой, таким образом, что изображение номера контейнера может быть получено путем операции считывания. Блок получения изображения также может быть цифровой видеокамерой, таким образом, что изображение номера контейнера может быть получено путем извлечения одного кадра с данными из видеопотока из видеокамеры с сохранением его как изображения.
Фиг. 4 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно второму примеру варианта осуществления настоящего раскрытия; и Фиг. 5a и Фиг. 5b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 4.
Как показано на Фиг. 4, триггерный блок содержит вторую группу датчиков и третью группу датчиков, расположенных разнесенными друг от друга в направлении движения контейнера относительно маршрута, при этом вторая группа датчиков содержит второй участок 22a передатчика сигнала и второй участок 22b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, а третья группа датчиков содержит третий участок 23a передатчика сигнала и третий участок 23b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения; По меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения, предусмотренные, соответственно для получения изображения номеров контейнера на передней поверхности А1 и задней поверхности А2 контейнера А. Как показано на Фиг. 5, этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в различные моменты времени на основе сигнала от триггерного блока в различные моменты времени» включает: когда вторая линия сигнала второй группы датчиков оказывается заблокированной одной из передней поверхности A1 и задней поверхности A2 (на Фиг. 5а - передней поверхностью А1) контейнера A, как показано на Фиг. 5а, получение изображения номера контейнера на одной из передней поверхности и задней поверхности, соответственно, одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 5а - первым блоком 11 получения изображения); и когда другая из передней поверхности A1 и задней поверхности A2 контейнера A (на Фиг. 3b - задняя поверхность А2) выходит из второй линии сигнала второй группы датчиков, таким образом, что вторая линия сигнала восстанавливается, как показано на Фиг. 5b, получение изображения номера контейнера на другой из передней поверхности и задней поверхности, соответственно, другим одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 5b - вторым блоком 12 получения изображения).
Фиг. 6 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно третьему примеру варианта осуществления настоящего раскрытия; и Фиг. 7a-d - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 6.
Как показано на Фиг. 6 и Фиг. 7a-d, по сравнению с примерами, показанными на Фиг. 4-5, по меньшей мере два блока получения изображения дополнительно включают третий блок 13 получения изображения, предусмотренный для получения изображения номера контейнера на одной боковой поверхности контейнера (правая боковая поверхность на Фиг. 7a и 7b).
В примерах, показанных на Фиг. 6 и Фиг. 7A-d этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в разные моменты времени на основе сигнала от триггерного блока» дополнительно включает следующие этапы:
когда вторая линия сигнала второй группы датчиков оказывается заблокированной передней поверхностью A1 и задней поверхностью A2 (на Фиг. 7A - передней поверхностью А1) контейнера A, как показано на Фиг. 7a, получение изображения номера контейнера на одной из передней поверхности и задней поверхности соответствующим одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 7A - первым блоком 11 получения изображения);
получение изображения номера контейнера на одной боковой поверхности посредством третьего блока 13 получения изображения, когда третья линия сигнала третьей группы датчиков блокируется одной из указанных передней поверхности А1 и задней поверхности А1 контейнера А (на Фиг. 7B - передней поверхностью А1); и
когда другая из передней поверхности A1 и задней поверхности A2 контейнера A (на Фиг. 7D - задняя поверхность А2) выходит из третьей линии сигнала третьей группы датчиков, так, что третья линия сигнала восстанавливается, как показано на Фиг. 7d, получение изображения номера контейнера на другой из передней поверхности и задней поверхности другим соответствующим одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 7D - вторым блоком 12 получения изображения).
Также, как показано на Фиг. 6 и Фиг. 7a-d, по меньшей мере два блока получения изображения дополнительно включают четвертый блок 14 получения изображения, предусмотренный для получения изображения номера контейнера, соответственно, на другой боковой поверхности (соответственно, левая боковая поверхность А4 на Фиг. 7a-c) контейнера. Этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в разные моменты времени, на основе сигнала от триггерного блока» дополнительно включает, между этапом, показанным на Фиг. 7B, и этапом, показанным на Фиг. 7d, получение изображения номера контейнера на другой боковой поверхности четвертым блоком 14 получения изображения, когда одна из передней поверхности A1 и задней поверхности A2 контейнера A (на Фиг. 7 - задняя поверхность A2) выходит из второй линии сигнала второй группы датчиков, так что вторая линия сигнала восстанавливается, как показано на Фиг. 7c.
В еще одном опционном варианте осуществления, показанном на Фиг. 6, cрединная точка линии соединения между первым блоком 11 получения изображения и вторым блоком 12 получения изображения также является срединной точкой линии соединения между третьим блоком 13 получения изображения и четвертым блоком 14 получения изображения. Такое симметричное расположение позволяет получить симметричные моменты времени считывания, так что блоки получения изображения, расположенные симметрично относительно друг друга, могут использовать один и тот же набор корректирующих параметров, снижая, таким образом загрузку, связанную с коррекцией изображений алгоритмом распознания цифр. В примере, как показано на Фиг. 7a-c, первый блок 11 получения изображения, второй блок 12 получения изображения, третий блок 13 получения изображения и четвертый блок 14 получения изображения считывают/снимают изображения на одинаковом расстоянии и под одинаковым углом считывания. Как таковые, положение считанной цифры в изображении и искажение цифры вследствие использования линз идентичны для блоков получения изображения. Для каждой искаженной цифры алгоритму изображения требуется набор корректирующих параметров для коррекции изображения цифры и последующего распознания цифры. Требуется применение корректирующих параметров для блоков получения изображения в различных положениях по очередности. Было обнаружено, что при использовании симметричного расположения корректирующие параметры, откалиброванные и сгенерированные одной камерой первого и второго блоков получения изображения могут использоваться для первого блока 11 получения изображения и второго блока 12 получения изображения, и корректирующие параметры, откалиброванные и сгенерированные одной камерой третьего и четвертого блоков получения изображения, также могут использоваться для третьего блока 13 получения изображения и четвертого блока 14 получения изображения, снижая, таким образом, загрузку на калибрование. В противном случае, при использовании асимметричного расположения требуется выполнение коррекции для всех блоков получения изображения, поскольку углы считывания и расстояния от соответствующих блоков получения изображения не совпадают между собой. Дополнительно, если моменты времени считывания не одинаковы или не симметричны относительно друг друга, когда контейнер проходит по маршруту в прямом и обратном направлениях, требуется дополнительная операция автоматического фокусирования для блока получения изображения, и времени для завершения операции автоматического фокусирования может быть недостаточно при прохождении контейнера на высокой скорости, что, таким образом, приводит к получению изображения не в фокусе.
Фиг. 8 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно четвертому примеру варианта осуществления настоящего раскрытия; и Фиг. 9a-d - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 8.
В примере, показанном на Фиг. 8:
триггерный блок содержит первую группу датчиков, вторую группу датчиков и третью группу датчиков, расположенных разнесенными друг от друга в направлении движения контейнера относительно маршрута, при этом первая группа датчиков расположена между второй группой датчиков и третьей группой датчиков в направлении движения, при этом первая группа датчиков содержит первый участок 21a передатчика сигнала и первый участок 21b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, при этом вторая группа датчиков содержит второй участок 22a передатчика сигнала и второй участок 22b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, а третья группа датчиков содержит третий участок 23a передатчика сигнала и третий участок 23b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения;
по меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения, предусмотренные для получения изображений, соответственно, на передней поверхности А1 и задней поверхности А2 контейнера А; и третий блок 13 получения изображения, предусмотренный для получения изображения номера контейнера на одной боковой поверхности (на Фиг. 9 - правой боковой поверхности А3) контейнера, и четвертый блок 14 получения изображения, предусмотренный для получения изображения номера контейнера на другой боковой поверхности (на Фиг. 9 - левой боковой поверхности А4) контейнера;
этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в различные моменты времени на основе сигнала от триггерного блока» включает: когда вторая линия сигнала второй группы датчиков оказывается заблокированной одной из передней поверхности A1 и задней поверхности A2 (на Фиг. 9 - передней поверхностью А1) контейнера A, как показано на Фиг. 9а, получение изображения номера контейнера на одной из передней поверхности и задней поверхности, соответственно, одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 9 - первым блоком 11 получения изображения); получение изображения номера контейнера на одной боковой поверхности третьим 13 блоком получения изображения, когда первая линия сигнала первой группы датчиков оказывается заблокированной одной из передней поверхности A1 и задней поверхности A2 (на Фиг. 9 - передней поверхностью А1), как показано на Фиг. 9B; когда другая из передней поверхности A1 и задней поверхности A2 контейнера A (на Фиг. 9 - задняя поверхность А2) выходит из первой линии сигнала первой группы датчиков, таким образом, что первая линия сигнала восстанавливается, как показано на Фиг. 9c, получение изображения номера контейнера на другой боковой поверхности четвертым блоком 14 получения изображения; и когда другая из передней поверхности A1 и задней поверхности A2 контейнера A (на Фиг. 9 - задняя поверхность А2) выходит из третьей линии сигнала третьей группы датчиков, таким образом, что третья линия сигнала восстанавливается, как показано на Фиг. 9d, получение изображения номера контейнера на другой из передней поверхности и задней поверхности, соответственно, другим одним из первого блока 11 получения изображения и второго блока 12 получения изображения (на Фиг. 9 - вторым блоком 12 получения изображения).
Фиг. 10 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно пятому примеру варианта осуществления настоящего раскрытия; и Фиг. 11a и Фиг. 11b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 10.
Триггерный блок содержит вторую группу датчиков и третью группу датчиков, расположенных разнесенными друг от друга в направлении движения контейнера относительно маршрута, при этом вторая группа датчиков содержит второй участок 22a передатчика сигнала и второй участок 22b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, а третья группа датчиков содержит третий участок 23a передатчика сигнала и третий участок 23b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения;
по меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения, предусмотренные для получения изображений, соответственно, на передней поверхности А1 и задней поверхности А2 контейнера А, и по меньшей мере два блока получения изображения дополнительно включают третий блок 13 получения изображения, предусмотренный для получения изображения номера контейнера на одной боковой поверхности контейнера, и четвертый блок 14 получения изображения, предусмотренный для получения изображения номера контейнера на другой боковой поверхности контейнера;
этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в разные моменты времени на основе сигнала от триггерного блока» включает:
как показано на Фиг. 11, когда третья линия сигнала третьей группы датчиков оказывается заблокированной передней поверхностью A1 и задней поверхностью A2 контейнера А (на Фиг. 11 - передней поверхностью А1), как показано на Фиг. 11A, получение изображения номера контейнера на одной боковой поверхности (на Фиг. 11 правой боковой поверхности А3) третьим блоком 13 получения изображения, получение изображения номера контейнера на одной из передней поверхности и задней поверхности соответствующим одним из первого блока получения изображения и второго блока получения изображения; и
когда другая из передней поверхности и задней поверхности (на Фиг. 11 - задняя поверхность A2) выходит из второй линии сигнала второй группы датчиков, таким образом, чтобы вторая линия сигнала была восстановлена, как показано на Фиг. 11b, получение изображения номера контейнера на другой боковой поверхности (на Фиг. 10 - левой боковой поверхности A4) четвертым блоком 14 и получение изображения номера контейнера на другой на другой из передней поверхности и задней поверхности контейнера соответствующим одним из первого блока получения изображения и второго блока получения изображения.
Фиг. 12 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно шестому примеру варианта осуществления настоящего раскрытия; и Фиг. 13a-c - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 12;
Триггерный блок содержит вторую группу датчиков и третью группу датчиков, расположенных разнесенными друг от друга в направлении движения контейнера относительно маршрута, при этом вторая группа датчиков содержит второй участок 22a передатчика сигнала и второй участок 22b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, а третья группа датчиков содержит третий участок 23a передатчика сигнала и третий участок 23b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения; триггерный блок дополнительно содержит первую группу датчиков, при этом первая группа датчиков содержит первый участок 21a передатчика сигнала и первый участок 21b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, и расположена между второй группой датчиков и третьей группой датчиков в направлении движения;
по меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения, предусмотренные для получения изображений, соответственно, на передней поверхности А1 и задней поверхности А2 контейнера А, и по меньшей мере два блока получения изображения дополнительно включают третий блок 13 получения изображения, предусмотренный для получения изображения номера контейнера на одной боковой поверхности контейнера, и четвертый блок 14 получения изображения, предусмотренный для получения изображения номера контейнера на другой боковой поверхности контейнера;
этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в разные моменты времени на основе сигнала от триггерного блока» включает:
когда третья линия сигнала третьей группы датчиков оказывается заблокированной передней поверхностью A1 и задней поверхностью A2 контейнера А (на Фиг. 13 - передней поверхностью А1), как показано на Фиг. 13A, получение изображения номера контейнера на одной боковой поверхности (на Фиг. 13 правой боковой поверхности А3) третьим блоком 13 получения изображения, получение изображения номера контейнера на одной из передней поверхности и задней поверхности соответствующим одним из первого блока получения изображения и второго блока получения изображения (на Фиг. 13 - первым блоком 11 получения изображения);
получение изображения номера контейнера на другой боковой поверхности (левой боковой поверхности А4 на Фиг. 13) посредством четвертого блока 14 получения изображения, когда другая из передней поверхности и задней поверхности контейнера (на Фиг. 13 - задняя поверхность А2) выходит из второй линии сигнала второй группы датчиков, таким образом, чтобы вторая линия сигнала была восстановлена, как показано на Фиг. 13b; и
получение изображения номера контейнера на другой из передней поверхности и задней поверхности контейнера соответствующим другим из первого блока получения изображения и второго блока получения изображения (на Фиг. 13 посредством второго блока 12 получения изображения), когда другая из передней поверхности и задней поверхности выходит из первой линии сигнала первой группы датчиков, таким образом, чтобы первая линия сигнала была восстановлена, как показано на Фиг. 13с.
Фиг. 14 - схематический вид сверху расположения системы получения номера контейнера согласно седьмому примеру варианта осуществления настоящего раскрытия; и Фиг. 15a-c - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 14;
В этом варианте осуществления триггерный блок содержит вторую группу датчиков и третью группу датчиков, расположенных разнесенными друг от друга в направлении движения контейнера относительно маршрута, при этом вторая группа датчиков содержит второй участок 22a передатчика сигнала и второй участок 22b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, а третья группа датчиков содержит третий участок 23a передатчика сигнала и третий участок 23b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения; триггерный блок дополнительно содержит первую группу датчиков, при этом первая группа датчиков содержит первый участок 21a передатчика сигнала и первый участок 21b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, и расположена между второй группой датчиков и третьей группой датчиков в направлении движения;
по меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения, предусмотренные для получения изображений, соответственно, на передней поверхности А1 и задней поверхности А2 контейнера А, и по меньшей мере два блока получения изображения дополнительно включают четвертый блок 14 получения изображения, предусмотренный для получения изображения номера контейнера на одной боковой поверхности контейнера;
этап «получения изображений номеров контейнера по меньшей мере на двух поверхностях из множества поверхностей, соответственно, по меньшей мере двумя блоками получения изображения в разные моменты времени на основе сигнала от триггерного блока» включает:
когда третья линия сигнала третьей группы датчиков оказывается заблокированной передней поверхностью A1 и задней поверхностью A2 контейнера А (на Фиг. 15 - передней поверхностью А1), как показано на Фиг. 15а, получение изображения номера контейнера на одной из передней поверхности и задней поверхности соответствующим одним из первого блока получения изображения и второго блока получения изображения (на Фиг. 15 - первым блоком 11 получения изображения);
получение изображения номера контейнера на одной боковой поверхности (левой боковой поверхности А4 на Фиг. 15) посредством четвертого блока 14 получения изображения, когда другая (на Фиг. 15 - задняя поверхность А2) из передней поверхности и задней поверхности контейнера выходит из второй линии сигнала второй группы датчиков, таким образом, чтобы вторая линия сигнала была восстановлена, как показано на Фиг. 15b; и
получение изображения номера контейнера на другой из передней поверхности и задней поверхности контейнера соответствующим другим из первого блока получения изображения и второго блока получения изображения (на Фиг. 15 посредством второго блока 12 получения изображения), когда другая из передней поверхности и задней поверхности выходит из первой линии сигнала первой группы датчиков, таким образом, чтобы первая линия сигнала была восстановлена, как показано на Фиг. 15с.
Фиг. 16a - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера согласно восьмому примеру варианта осуществления настоящего раскрытия; и Фиг. 16b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера согласно вариации восьмого примера варианта осуществления настоящего раскрытия.
Как показано на фиг. 16a и 16b, по меньшей мере два блока получения изображения включают один блок получения изображения, предусмотренный для получения изображения номера контейнера на одной из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера (на Фиг. 16A, например, - блок 11 получения изображения, получающий изображение номера контейнера на передней поверхности A1; на Фиг. 16b, например, - блок 12 получения изображения, получающий изображение номера контейнера на задней поверхности A2), и другой блок получения изображения, предусмотренный для получения изображения номера контейнера на другой из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера (на Фиг. 16a, например, - блок 13 получения изображения, получающий изображение номера контейнера на правой боковой поверхности A3; на Фиг. 16b, например, - блок 14 получения изображения, получающий изображение номера контейнера на левой боковой поверхности A4);
триггерный блок содержит группу датчиков, например, обозначенных номерами ссылок 21a, 21b на Фиг. 16a, 16b, и один блок получения изображения, и другой блок получения изображения активируются одновременно на основе сигналов от группы датчиков. Например, на Фиг. 16a, блоки 11 и 13 получения изображения активируются одновременно на основе линии сигнала от группы датчиков, заблокированной передней поверхностью A1 контейнера, а на Фиг. 16b, блоки 12 и 14 получения изображения активируются одновременно на основе восстановления линии сигнала от группы датчиков после выхода из нее задней поверхности A2 контейнера.
Фиг. 17 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно девятому примеру варианта осуществления настоящего раскрытия; и Фиг. 18a и Фиг. 18b - схематические представления процесса получения изображений номеров контейнера на множестве поверхностей контейнера с применением системы получения номера контейнера, показанной на Фиг. 17.
Как показано на фиг. 17 и фиг. 18a и 18b, по меньшей мере два блока получения изображения включают один блок получения изображения, предусмотренный для получения изображения номера контейнера на одной из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера (на Фиг. 18a, например, - блок 11 получения изображения, получающий изображение номера контейнера на передней поверхности A1), и другой блок получения изображения, предусмотренный для получения изображения номера контейнера на другой из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера (на Фиг. 18b, например, - блок 13 получения изображения, получающий изображение номера контейнера на правой боковой поверхности A3); при этом триггерный блок содержит две группы датчиков 22, 23, и один блок 11 получения изображения и другой блок 13 получения изображения активируются одновременно на основе сигналов от двух групп датчиков; каждая группа датчиков содержит участок передатчика сигнала и участок приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения контейнера относительно маршрута.
Фиг. 19 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно десятому примеру варианта осуществления настоящего раскрытия, показывающий симметрические расположения блоков получения изображения и датчиков. Фиг. 20 - схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 19, при этом верхняя часть Фиг. 20 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и время считывания системы получения номера контейнера, а нижняя часть Фиг. 20 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 19.
На Фиг. 19 система содержит три группы датчиков, например, оптических датчиков, соответственно имеющих или определяющих линии сигнала L1, L2, L3, и четыре блока 11, 12, 13, 14 получения изображения, например, видеокамеры; при этом статус датчиков установлен как S3S2S1, где S3, S2 и S1 соответствуют линиям L2, L1 и L3, соответственно, а статус блоков получения изображения установлен как C4C3C2C1, где С4, C3, C2 и C1 соответствуют блокам 12, 14, 13 и 11 получения изображения, соответственно; предполагается, что S=1 указывает на то, что линия сигнала датчиков заблокирована, тогда как S=0 указывает на то, что линия сигнала датчиков разблокирована или восстановлена; также предполагается, что C=1 указывает на то, что блок получения изображения выполняет одну операцию считывания; затем статус системы в любой момент времени может быть представлен как  .
.
Определено, что направление, в котором контейнер проходит последовательно мимо датчиков S3, S2, S1, является прямым направлением, тогда как направление, в котором контейнер проходит последовательно мимо датчиков S1, S2, S3, является обратным направлением.
При использовании симметричного расположения датчиков и устройств получения изображения, моменты времени считывания обозначений на контейнере на четырех поверхностях контейнера также могут быть сконфигурированы симметричным образом для двунаправленной саморегулирующейся системы получения номера контейнера, или могут быть сконфигурированы асимметрично.
Моменты времени считывания могут быть выбраны при общем рассмотрении следующих факторов: угол считывания блока получения изображения, расстояние между блоком получения изображения и поверхностью контейнера, логическая схема считывания, требования к помехоустойчивости и тому подобные. Двунаправленная саморегулирующаяся система получения номера контейнера также может применяться с асимметричным расположением и различными моментами времени считывания.
Независимо от применяемого расположения, набор моментов времени считывания может быть определен на основе применяемого расположения. Множество моментов времени считывания могут быть выбраны для одного расположения, но существует только один оптимальный набор моментов считывания. Оптимальные моменты времени считывания характеризуются тем, что:
независимо от направления, в котором контейнер проходит по маршруту, относительные положения между блоком получения изображения и контейнером являются постоянными при считывании номера контейнера в одном и том же положении, так что приближения и настройки других параметров блока получения изображения не требуется, когда контейнер проходит в прямом и обратном направлениях; и
моменты времени считывания являются одними и теми же или симметричными относительно друг друга, и блоки получения изображения, симметричные относительно друг друга, могут использовать один и тот же ряд корректирующих параметров, снижая, таким образом загрузку, связанную с коррекцией изображений алгоритмом распознания цифр.
Симметричное расположение, показанное на Фиг. 19, взято в качестве примера. На Фиг. 20 показано отношение времени считывания и трансформации статуса, когда контейнер проходит в прямом направлении, при этом пунктирные рамки, показанные на фигурах, отображают четыре статуса считывания.
На Фиг. 20:
в Статусе 0: контейнер еще не вошел в маршрут, статус датчика представляет собой 000, статус блока получения изображения представляет собой 0000;
в Статусе 1: передний край контейнера блокирует L2, статус датчика представляет собой 100, статус блока получения изображения представляет собой 0001, а блок получения изображения 11 выполняет операцию считывания в соответствующее время считывания a);
в Статусе 2: контейнер блокирует L1 и L2, статус датчика представляет собой 110, а статус блока получения изображения представляет собой 0000;
в Статусе 3: контейнер блокирует датчики L3, L2 и L1, статус датчика представляет собой 111, статус блока получения изображения представляет собой 0010, а блок 13 получения изображения выполняет операцию считывания в соответствующее время считывания b);
в Статусе 4: датчик L2 восстановлен, статус датчика представляет собой 011, статус блока получения изображения представляет собой 0100, а блок получения изображения 14 выполняет операцию считывания в соответствующее время считывания с);
в Статусе 5: датчик L1 восстановлен, статус датчика представляет собой 001, а статус блока получения изображения представляет собой 0000; и
в Статусе 6: датчик L3 восстановлен, статус датчика представляет собой 000, статус блока получения изображения представляет собой 1000, а блок получения изображения 12 выполняет операцию считывания в соответствующее время считывания d);
После вышеперечисленных Статусов контейнер проходит по маршруту, и датчики и блоки получения изображения снова входят в Статус 0.
Фиг. 21 - еще одно схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 19, при этом верхняя часть Фиг. 21 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и показателями времени считывания системы получения номера контейнера, а нижняя часть Фиг. 21 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 19.
На Фиг. 21:
в Статусе 0: контейнер еще не вошел в маршрут, статус датчика представляет собой 000, а статус блока получения изображения представляет собой 0000;
в Статусе 1: передний край контейнера блокирует L3, статус датчика представляет собой 001, статус блока получения изображения представляет собой 1000, а блок получения изображения 12 выполняет операцию считывания в соответствующее время считывания d);
в Статусе 2: контейнер блокирует L1 и L3, статус датчика представляет собой 011, а статус блока получения изображения представляет собой 0000;
в Статусе 3: контейнер блокирует датчики L1, L2 и L3, статус датчика представляет собой 111, статус блока получения изображения представляет собой 0100, а блок 14 получения изображения выполняет операцию считывания в соответствующее время считывания с);
в Статусе 4: датчик L3 восстановлен, статус датчика представляет собой 110, статус блока получения изображения представляет собой 0010, а блок получения изображения 13 выполняет операцию считывания в соответствующее время считывания b);
в Статусе 5: датчик L1 восстановлен, статус датчика представляет собой 100, а статус блока получения изображения представляет собой 0000; и
в Статусе 6: датчик L2 восстановлен, статус датчика представляет собой 000, статус блока получения изображения представляет собой 0001, а блок получения изображения 11 выполняет операцию считывания в соответствующее время считывания a);
После вышеперечисленных Статусов контейнер проходит по маршруту, и датчики и блоки получения изображения снова входят в Статус 0, ожидая вхождения нового транспортного средства.
Фиг. 22 - схематический вид сверху расположения и конструкции системы получения номера контейнера согласно одиннадцатому примеру варианта осуществления настоящего раскрытия. Фиг. 23 - схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 22, при этом верхняя часть Фиг. 23 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и показателями времени считывания системы получения номера контейнера, а нижняя часть Фиг. 23 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 22.
На Фиг. 22 система содержит три группы датчиков, например, оптических датчиков, соответственно имеющих или определяющих линии сигнала L1, L2, L3, и три блока 11, 12, 14 получения изображения, например, видеокамеры; при этом статус датчиков установлен как S3S2S1, где S3, S2 и S1 соответствуют линиям L2, L1 и L3, соответственно, а статус блоков получения изображения установлен как C3C2C1, где C3, C2 и C1 соответствуют блокам 12, 14 и 11 получения изображения, соответственно; предполагается, что S=1 указывает на то, что линия сигнала датчиков заблокирована, тогда как S=0 указывает на то, что линия сигнала датчиков разблокирована или восстановлена; также предполагается, что C=1 указывает на то, что блок получения изображения выполняет одну операцию считывания; затем статус системы в любой момент времени может быть представлен как  .
.
Определено, что направление, в котором контейнер проходит последовательно мимо датчиков S3, S2, S1, является прямым направлением, тогда как направление, в котором контейнер проходит последовательно мимо датчиков S1, S2, S3, является обратным направлением.
Расположение, показанное на Фиг. 22, взято в качестве примера. На Фиг. 23 показано отношение времени считывания и трансформации статуса, когда контейнер проходит в прямом направлении, при этом пунктирные рамки, показанные на фигурах, отображают три статуса считывания.
На Фиг. 23:
в Статусе 0: контейнер еще не вошел в маршрут, статус датчика представляет собой 000, а статус блока получения изображения представляет собой 000;
в Статусе 1: передний край контейнера блокирует L2, статус датчика представляет собой 100, а статус блока получения изображения представляет собой 000;
в Статусе 2: контейнер блокирует L1 и L2, статус датчика представляет собой 110, а статус блока получения изображения представляет собой 000;
в Статусе 3: контейнер блокирует датчик L1, L2 и L3, статус датчика представляет собой 111, статус блока получения изображения представляет собой 001, а блок 11 получения изображения выполняет операцию считывания в соответствующее время считывания a);
в Статусе 4: датчик L2 восстановлен, статус датчика представляет собой 011, статус блока получения изображения представляет собой 010, а блок получения изображения 14 выполняет операцию считывания в соответствующее время считывания b);
в Статусе 5: датчик L1 восстановлен, статус датчика представляет собой 001, статус блока получения изображения представляет собой 100, а блок получения изображения 12 выполняет операцию считывания в соответствующее время считывания c); и
в Статусе 6: датчик L3 восстановлен, статус датчика представляет собой 000, а статус блока получения изображения представляет собой 000.
После вышеперечисленных Статусов контейнер проходит по маршруту, и датчики и блоки получения изображения снова входят в Статус 0, ожидая вхождения нового транспортного средства.
Фиг. 24 - еще одно схематическое представление процесса, показывающее считывание статусов системы получения номера контейнера, показанной на Фиг. 22, при этом верхняя часть Фиг. 24 иллюстрирует относительное движение между контейнером и системой получения номера контейнера и показателями времени считывания системы получения номера контейнера, а нижняя часть Фиг. 24 иллюстрирует схематическое представление отношения времени считывания и трансформации статуса системы получения номера контейнера, показанной на Фиг. 22, при этом пунктирные рамки отображают три статуса считывания.
На Фиг. 24:
в Статусе 0: контейнер еще не вошел в маршрут в направлении транспортного средства, на котором он установлен, статус датчика представляет собой 000, а статус блока получения изображения представляет собой 000;
в Статусе 1: передний край контейнера блокирует L3, статус датчика представляет собой 001, а статус блока получения изображения представляет собой 000;
в Статусе 2: контейнер блокирует L1 и L3, статус датчика представляет собой 011, статус блока получения изображения представляет собой 100, а блок 12 получения изображения выполняет операцию считывания в соответствующее время считывания с);
в Статусе 3: контейнер блокирует датчик L1, L2 и L3, статус датчика представляет собой 111, статус блока получения изображения представляет собой 010, а блок 14 получения изображения выполняет операцию считывания в соответствующее время считывания b);
в Статусе 4: датчик L3 восстановлен, статус датчика представляет собой 110, статус блока получения изображения представляет собой 001, а блок получения изображения 11 выполняет операцию считывания в соответствующее время считывания a);
в Статусе 5: датчик L1 восстановлен, статус датчика представляет собой 100, а статус блока получения изображения представляет собой 000; и
в Статусе 6: датчик L2 восстановлен, статус датчика представляет собой 000, а статус блока получения изображения представляет собой 000.
После вышеперечисленных Статусов датчики и блоки получения изображения снова входят в Статус 0, ожидая вхождения нового транспортного средства.
Независимо от того, проходит ли контейнер в прямом направлении или в обратном направлении, направление, в котором следующее транспортное средство заходит на маршрут не ограничено.
При симметричном расположении, независимо от того, проходит ли контейнер в прямом направлении или в обратном направлении, угол считывания и расстояние считывания блока 11 получения изображения, по сути, остаются такими теми же, как угол и расстояние для блока 12 получения изображения, и угол считывания и расстояние считывания блока 13 получения изображения, по сути, остаются такими теми же, как угол и расстояние для блока 14 получения изображения, так что изображения, считываемые блоками получения изображения могут быть скорректированы с использованием алгоритма распознания цифр с одинаковым набором корректирующих параметров.
Выше был описан способ идентификации номера контейнера, и, соответственно, варианты осуществления настоящего раскрытия обеспечивают систему идентификации номера контейнера, содержащую:
устройство получения изображения, расположенное вдоль маршрута, по которому будет проходить контейнер, при этом устройство получения изображения содержит триггерный блок и множество блоков получения изображения, при этом по меньшей мере два блока получения изображения из множества блоков получения изображения предусмотрены соответственно для получения изображений номеров контейнеров по меньшей мере на двух поверхностях из множества поверхностей контейнера, проходящего по указанному маршруту, на основе сигнала от триггерного блока; и
устройство идентификации номера, сконфигурированное для идентификации номера контейнера по меньшей мере на основе изображений или данных в отношении номера контейнера по меньшей мере от двух блоков получения изображения.
Как таковые, изображения номеров контейнера по меньшей мере на двух поверхностях контейнера получают посредством блоков получения изображения на основе сигнала триггера от триггерного блока, и цифры номера контейнера извлекают из одного или более полученных изображений посредством алгоритма распознания цифр. Изображения номера контейнера для одного и того же контейнера, считанные устройством получения изображения получают в различных положениях и под различным углом относительно контейнера, результаты распознания, соответственно, получают из изображений посредством алгоритма распознания цифр, затем происходит подтверждение результатов для получения результата с максимальной точностью. Как известно, на всех поверхностях контейнера имеется один и тот же номер контейнера, то есть, даже если номер контейнера на одной поверхности не может быть полностью идентифицирован вследствие его загрязнения, повреждения, блокировки или неполной видимости, идентификация может быть достигнута на основе полного номера контейнера на другой поверхности, или посредством рассмотрения и сопоставления номеров контейнера по меньшей мере на двух поверхностях (например, различные части номеров на двух поверхностях загрязнены или повреждены, то есть, часть номера на первой поверхности загрязнена или повреждена, тогда как эта же часть номера на другой поверхности видна полностью, таким образом, полный номер может быть получен замещением загрязненной или поврежденной части номера на одной поверхности соответствующей частью номера на другой поверхности), таким образом, номер контейнера для указанного контейнера может быть с точностью получен в случае, когда контейнер проходит по маршруту, за один проход, то есть получение изображений номеров одного и того же контейнера в разных положениях будет способствовать повышению точности результата распознания.
Опционно, в вышеописанной системе расстояние между проекциями по меньшей мере двух блоков получения изображения в направлении движения контейнера относительно указанного маршрута меньше длины контейнера. Поскольку расстояние между блоками получения изображения в направлении движения меньше, чем длина контейнера, длина маршрута может быть установлена меньшей, чем длина контейнера, экономя, таким образом место установки.
Дополнительно, по меньшей мере два блока получения изображения расположены таким образом, чтобы относительное положение каждого из указанных по меньшей мере двух блоков получения изображения относительно соответствующей одной из поверхностей контейнера было закреплено в двух противоположных направлениях движения контейнера относительно указанного маршрута при получении изображения номера контейнера на соответствующей поверхности. Иными словами, независимо от направления, в котором контейнер проходит по маршруту, относительные положения между видеокамерой и контейнером являются постоянными при считывании номера контейнера в одном и том же положении, и приближения и настройки других параметров видеокамеры не требуется, когда контейнер проходит в прямом и обратном направлениях. Как таковое, настоящее раскрытие предоставляет двунаправленную саморегулирующуюся систему получения изображения номера контейнера. То есть, не имеет значения направление прохождения контейнера по маршруту, соответственно, фото участка контейнера, на который нанесено изображение с номером может быть получено отчетливо, позволяя, таким образом, получить номер контейнера. На основе номера контейнера способ согласно настоящему раскрытию позволяет определять типы и номера контейнеров, проходящих по маршруту, и позволяет получать коды размеров и коды типов контейнеров. При двунаправленной саморегулирующейся системе получения номера контейнера, направление движения контейнера относительно маршрута не ограничено. В частности, при установке на системе проверки контейнеров посредством рентгеновских лучей, двунаправленную саморегулирующуюся систему получения номера контейнера устанавливают на неизменном маршруте или предоставляют на несущем транспортном средстве; когда двунаправленная проверка представлена системой проверки контейнеров посредством рентгеновских лучей, с целью повышения скорости прохождения контейнеров, система получения номера контейнера может считывать номера контейнеров синхронно.
Опционно, как показано на Фиг. 2, триггерный блок содержит первую группу датчиков, содержащую первый участок 21a передатчика сигнала и первый участок 21b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения; по меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения, предусмотренные для получения изображений, соответственно, на передней поверхности и задней поверхности контейнера, при этом первый блок получения изображения и второй блок получения изображения расположены, соответственно, с обеих сторон от первой линии сигнала первой группы датчиков. Кроме того, срединная точка линии соединения между первым блоком 11 получения изображения и вторым блоком 12 получения изображения также является срединной точкой первой линии сигнала.
Опционно, как показано на Фиг. 4, триггерный блок содержит вторую группу датчиков и третью группу датчиков, расположенных разнесенными друг от друга в направлении движения контейнера относительно маршрута, при этом вторая группа датчиков содержит второй участок 22a передатчика сигнала и второй участок 22b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, а третья группа датчиков содержит третий участок 23a передатчика сигнала и третий участок 23b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения; по меньшей мере два блока получения изображения включают первый блок 11 получения изображения и второй блок 12 получения изображения предусмотренные для получения изображений номеров контейнера, соответственно, на передней поверхности и задней поверхности контейнера, при этом первый блок 11 получения изображения и второй блок 12 получения изображения расположены, соответственно, с обеих сторон от первой линии сигнала первой группы датчиков. Также, как показано на фиг. 6-7d, по меньшей мере два блока получения изображения дополнительно включают третий блок 13 получения изображения, предусмотренный для получения изображения номера контейнера на одной боковой поверхности контейнера. Кроме того, по меньшей мере два блока получения изображения дополнительно включают четвертый блок 14 получения изображения, предусмотренный для получения изображения номера контейнера на другой боковой поверхности контейнера. В одном опционном примере cрединная точка линии соединения между первым блоком 11 получения изображения и вторым блоком 12 получения изображения также является срединной точкой линии соединения между третьим блоком 13 получения изображения и четвертым блоком 14 получения изображения.
Как показано на фиг. 8-9d, 12-15c, триггерный блок дополнительно содержит первую группу датчиков, при этом первая группа датчиков содержит первый участок 21a передатчика сигнала и первый участок 21b приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения, при этом первая группа датчиков расположена между второй группой датчиков и третьей группой датчиков в направлении движения контейнера; по меньшей мере два блока получения изображения дополнительно могут включать третий блок 13 получения изображения, предусмотренный для получения изображения номера контейнера на одной боковой поверхности контейнера, и/или четвертый блок 14 получения изображения, предусмотренный для получения изображения номера контейнера, соответственно, на другой боковой поверхности. Также, как показано на фиг. 8-9d, первая группа датчиков расположена в промежуточном положении между второй группой датчиков и третьей группой датчиков в направлении движения; и cрединная точка линии соединения между первым блоком получения изображения и вторым блоком получения изображения также является срединной точкой линии соединения между третьим блоком получения изображения и четвертым блоком получения изображения и срединной точкой первой линии сигнала.
В системе получения номера контейнера согласно настоящему раскрытию симметричное расположение первого блока получения изображения и второго блока получения изображения и/или симметричное расположение третьего блока получения изображения и четвертого блока получения изображения позволяет получить одни и те же или симметричные относительно друг друга моменты времени считывания, таким образом, чтобы расположенные симметрично относительно друг друга блоки получения изображения могли использовать один и тот же набор корректирующих параметров, снижая, таким образом загрузку, связанную с коррекцией изображений алгоритмом распознания цифр. В примере, например, как показано на Фиг. 5a и 5b, первый блок 11 получения изображения и второй блок 12 получения изображения считывают изображения на одном и том же расстоянии считывания и под одним и тем же углом. Как таковые, положение считанной цифры в изображении и искажение цифры вследствие использования линз идентичны для двух блоков получения изображения. Для каждой искаженной цифры алгоритму изображения требуется набор корректирующих параметров для коррекции изображения цифры и последующего распознания цифры. Требуется использование корректирующих параметров для блоков получения изображения в различных положениях по очередности. Было обнаружено, что при использовании симметричного расположения корректирующие параметры, откалиброванные и сгенерированные одной камерой, могут использоваться для первого блока 11 получения изображения и второго блока 12 получения изображения, снижая, таким образом, загрузку на калибрование. В противном случае, при использовании не симметричного расположения требуется выполнение коррекции для всех блоков получения изображения, поскольку углы считывания и расстояния от соответствующих блоков получения изображения не совпадают между собой. Дополнительно, если моменты времени считывания не одинаковы или не симметричны относительно друг друга, когда контейнер проходит по маршруту в прямом и обратном направлениях, требуется дополнительная операция автоматического фокусирования для блока получения изображения, и времени для завершения операции автоматического фокусирования может быть недостаточно при прохождении контейнера на высокой скорости, что, таким образом, приводит к получению изображения не в фокусе.
Как показано на Фиг. 17, по меньшей мере два блока получения изображения включают один блок 11 (12) получения изображения, предусмотренный для получения изображения номера контейнера на одной из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера и другой блок 13 (14) получения изображения, предусмотренный для получения изображения номера контейнера на другой из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера; при этом триггерный блок содержит группу датчиков, и один блок получения изображения и другой блок получения изображения могут активироваться одновременно на основе сигналов от группы датчиков.
Как показано на фиг. 18 - 19, по меньшей мере два блока получения изображения включают один блок 11 получения изображения, предусмотренный для получения изображения номера контейнера на одной из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера и другой блок 13 получения изображения, предусмотренный для получения изображения номера контейнера на другой из передней поверхности, задней поверхности, боковых поверхностей, и верхней поверхности контейнера; при этом триггерный блок содержит две группы датчиков 22, 23, и один блок получения изображения и другой блок получения изображения могут активироваться одновременно на основе сигналов от двух групп датчиков; каждая группа датчиков содержит участок передатчика сигнала и участок приема сигнала, расположенные с обеих сторон контейнера в направлении, перпендикулярном направлению движения контейнера относительно маршрута.
Несмотря на то, что выше были показаны и описаны несколько иллюстративных вариантов осуществления, содержащих принципы настоящего изобретения, настоящее изобретение не ограничено этими раскрытыми вариантами осуществления. Напротив, Заявитель настоящей заявки предусматривает включение любых изменений, применений и модификаций с использованием основных принципов настоящего изобретения. Дополнительно, настоящее изобретение предусматривает включение содержания, вытекающего из настоящего раскрытия и подпадающего под известные или традиционные средства в области, к которой относится настоящее изобретение.
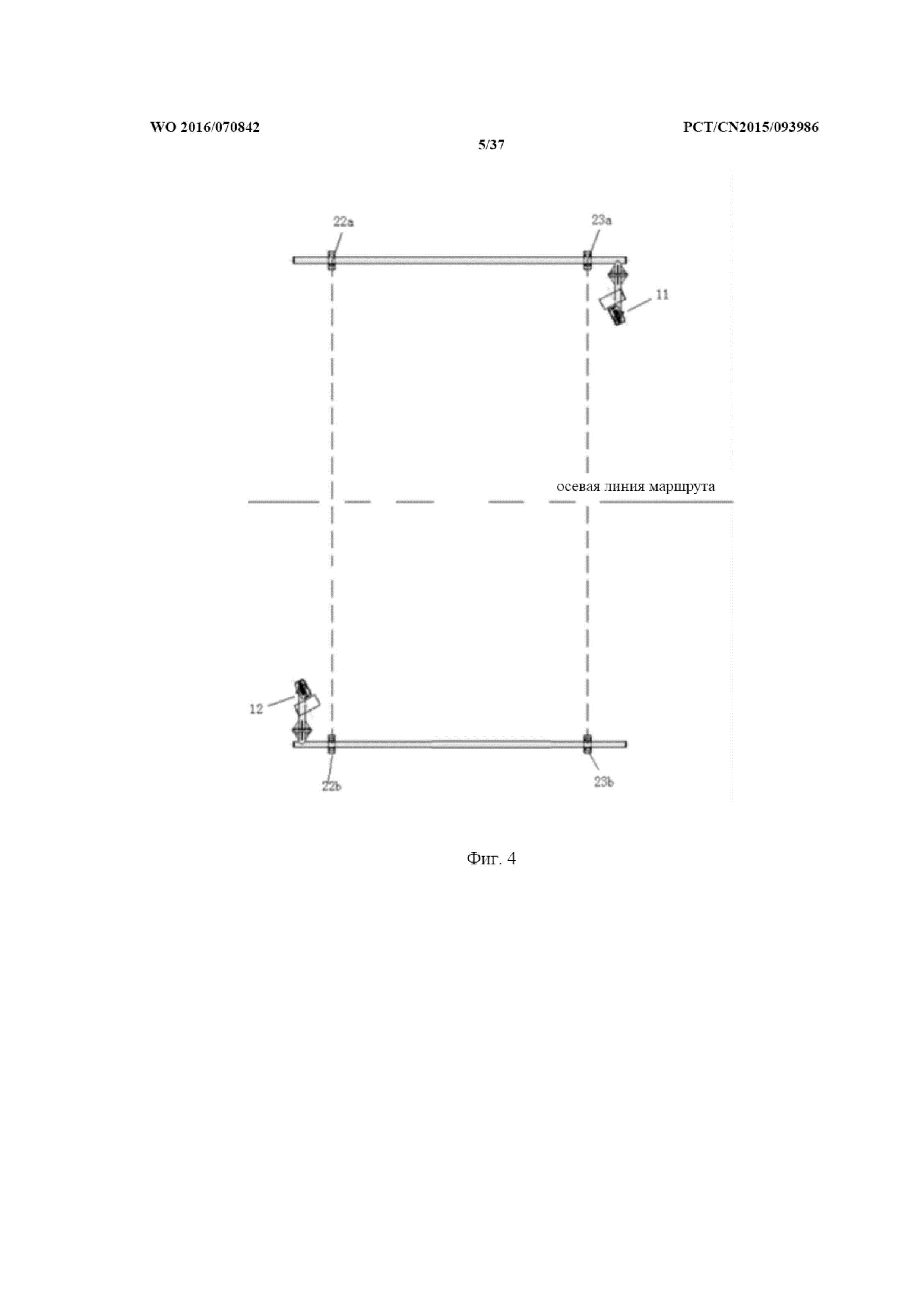
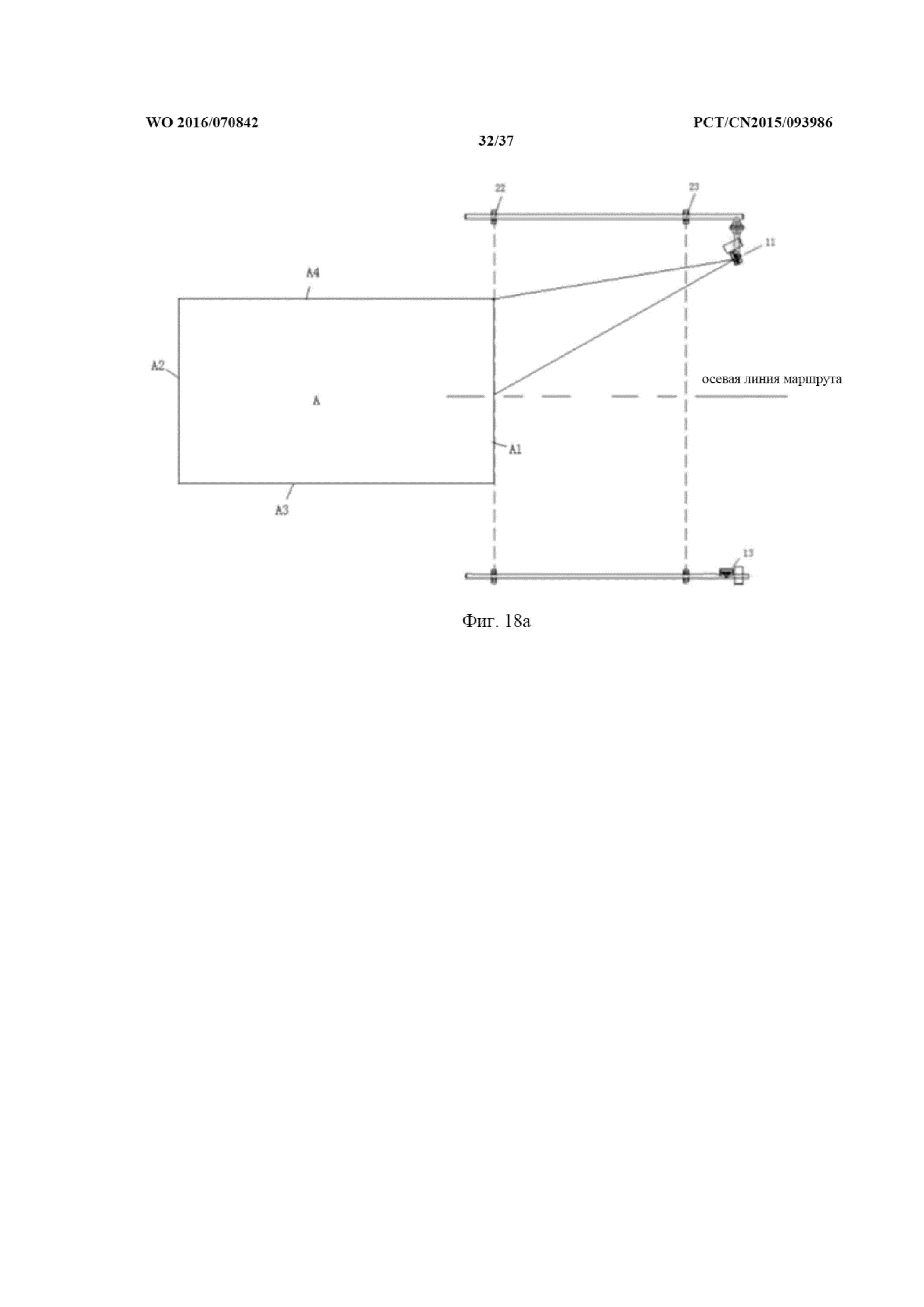
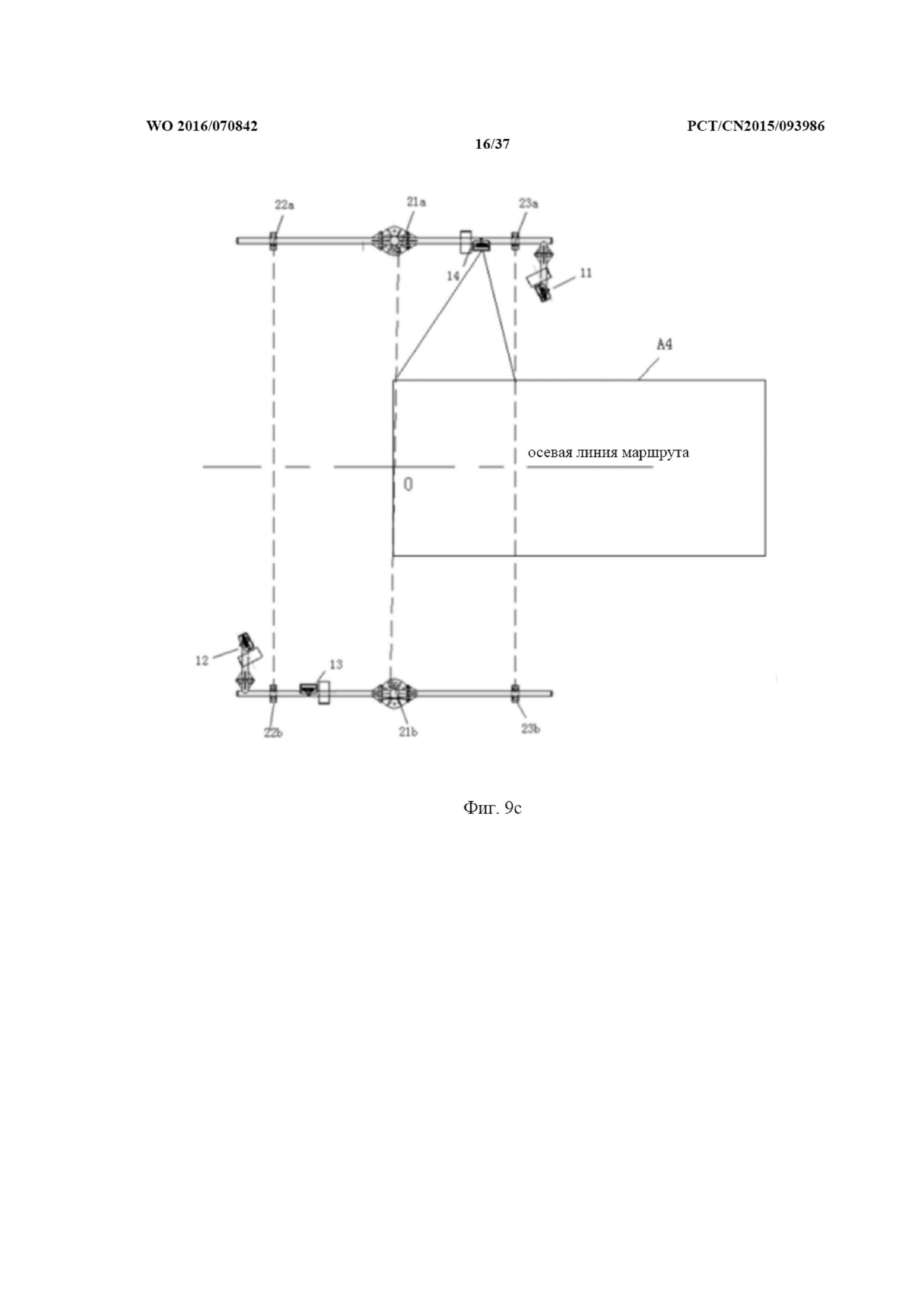
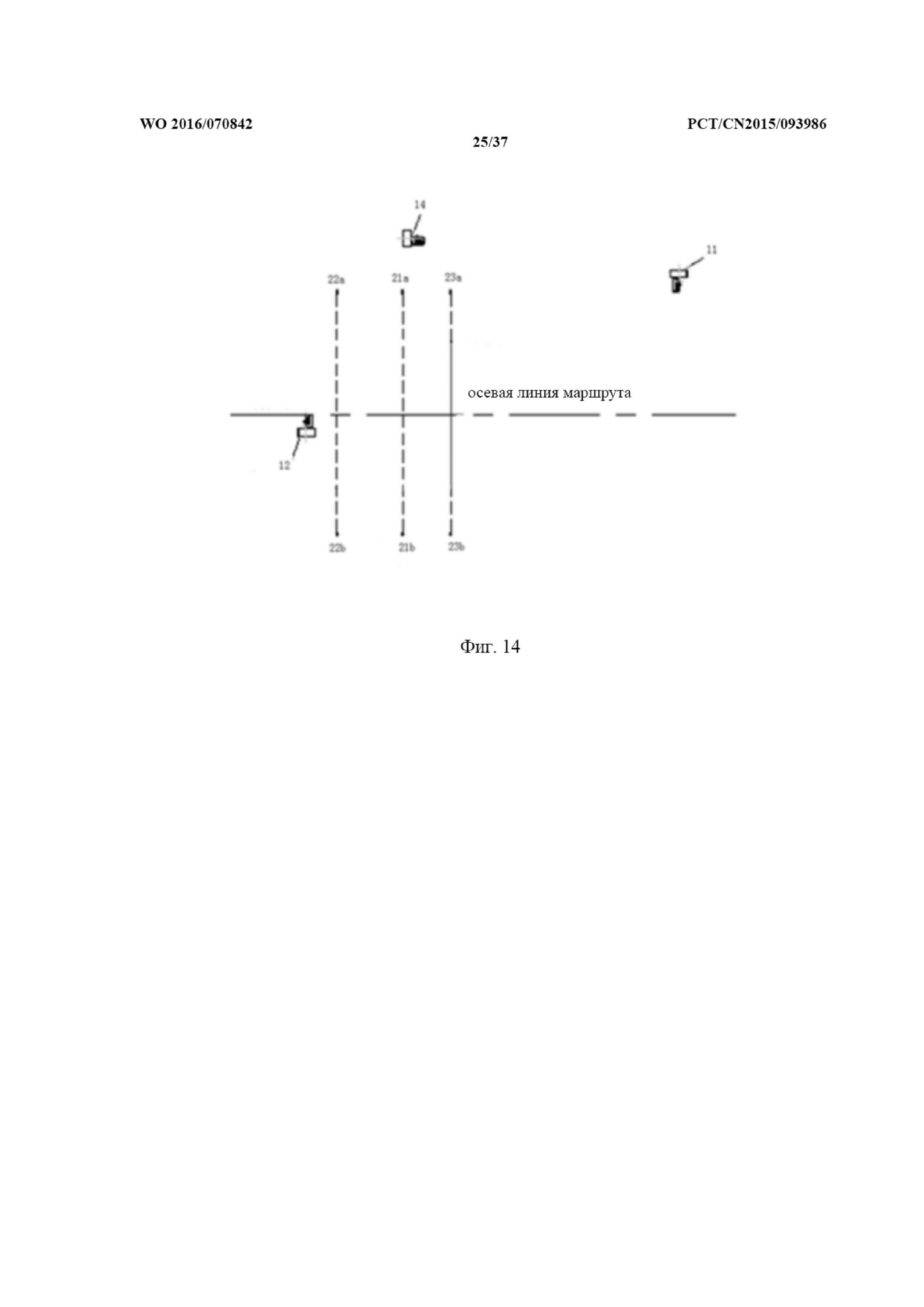
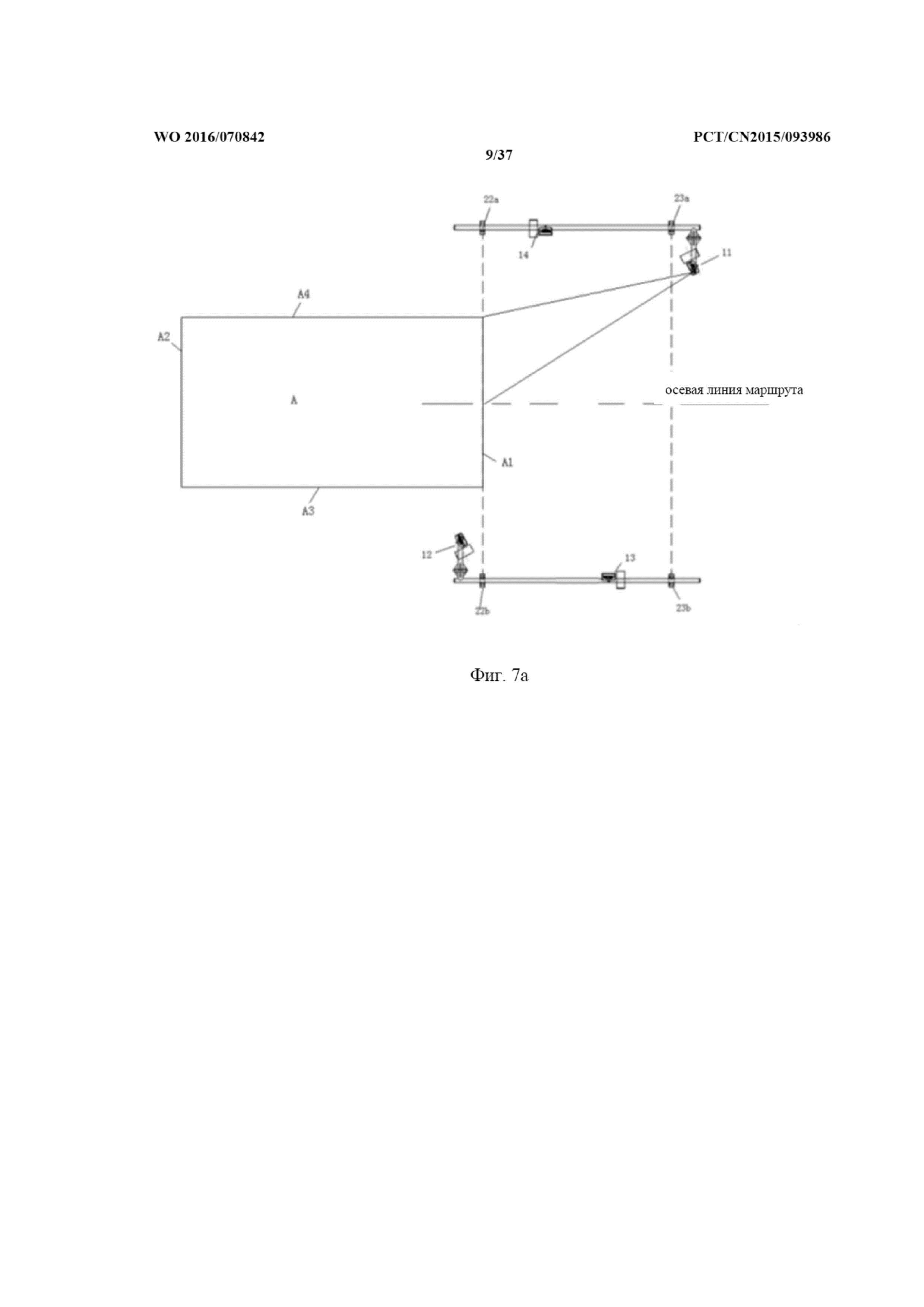

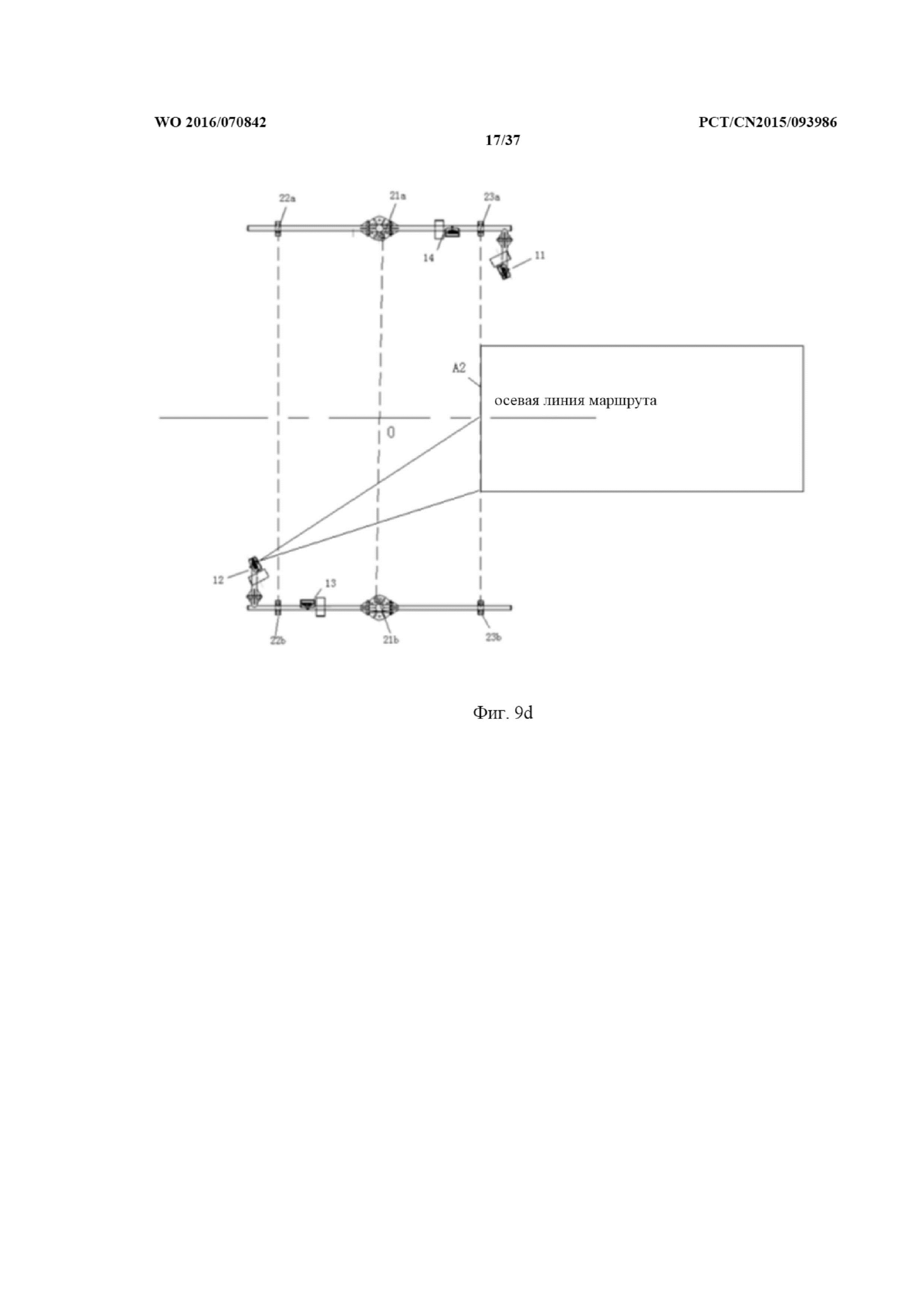
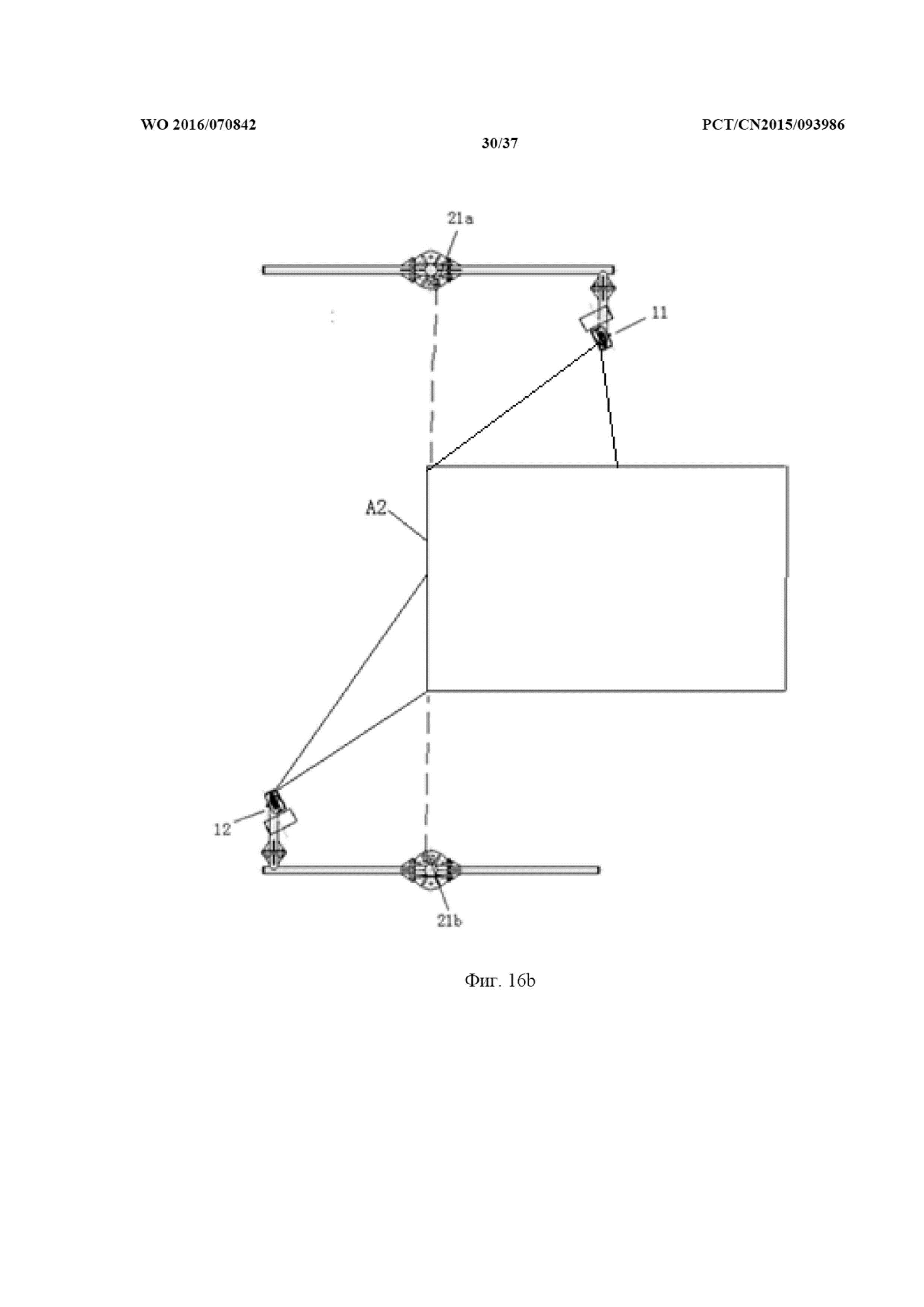
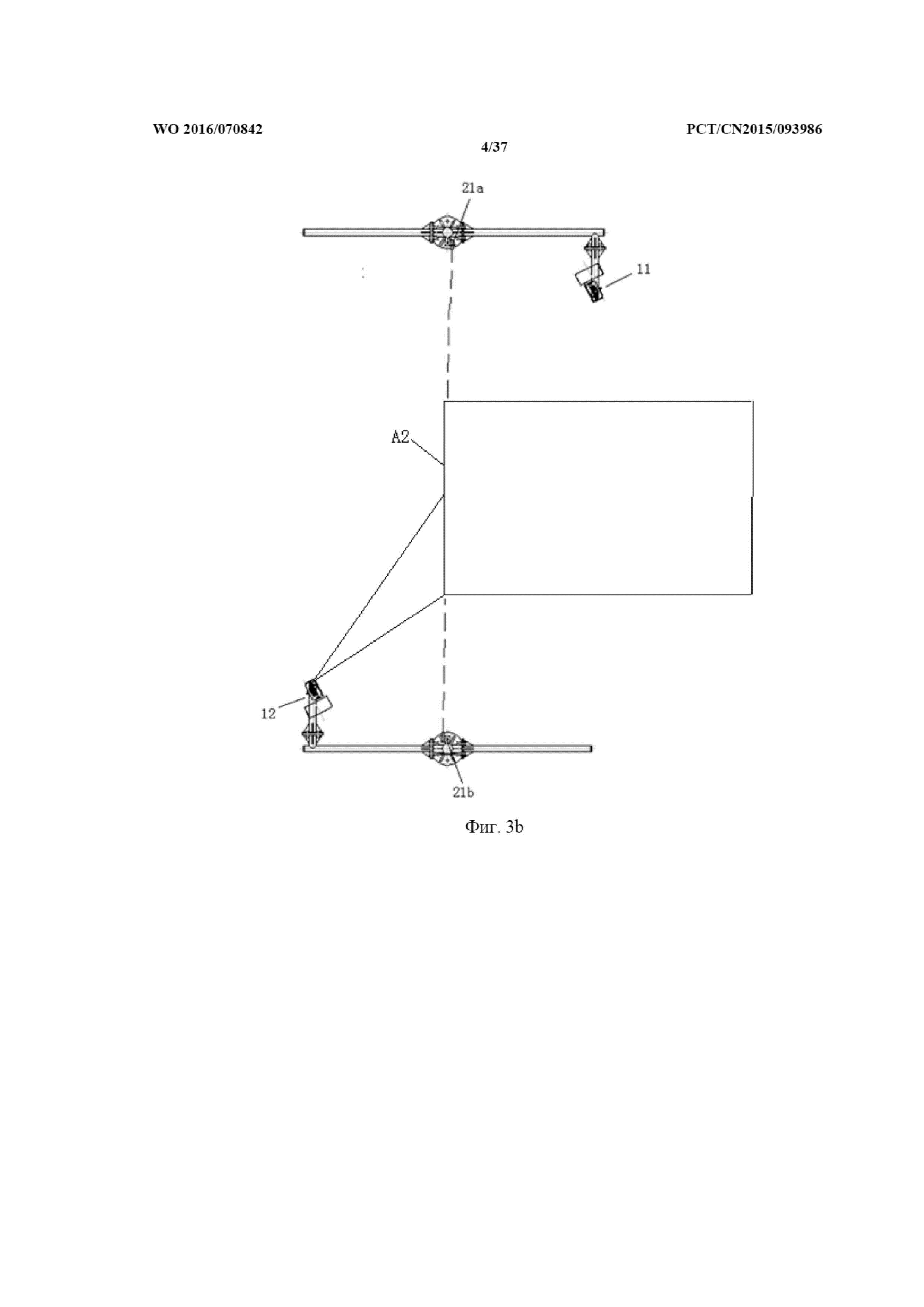
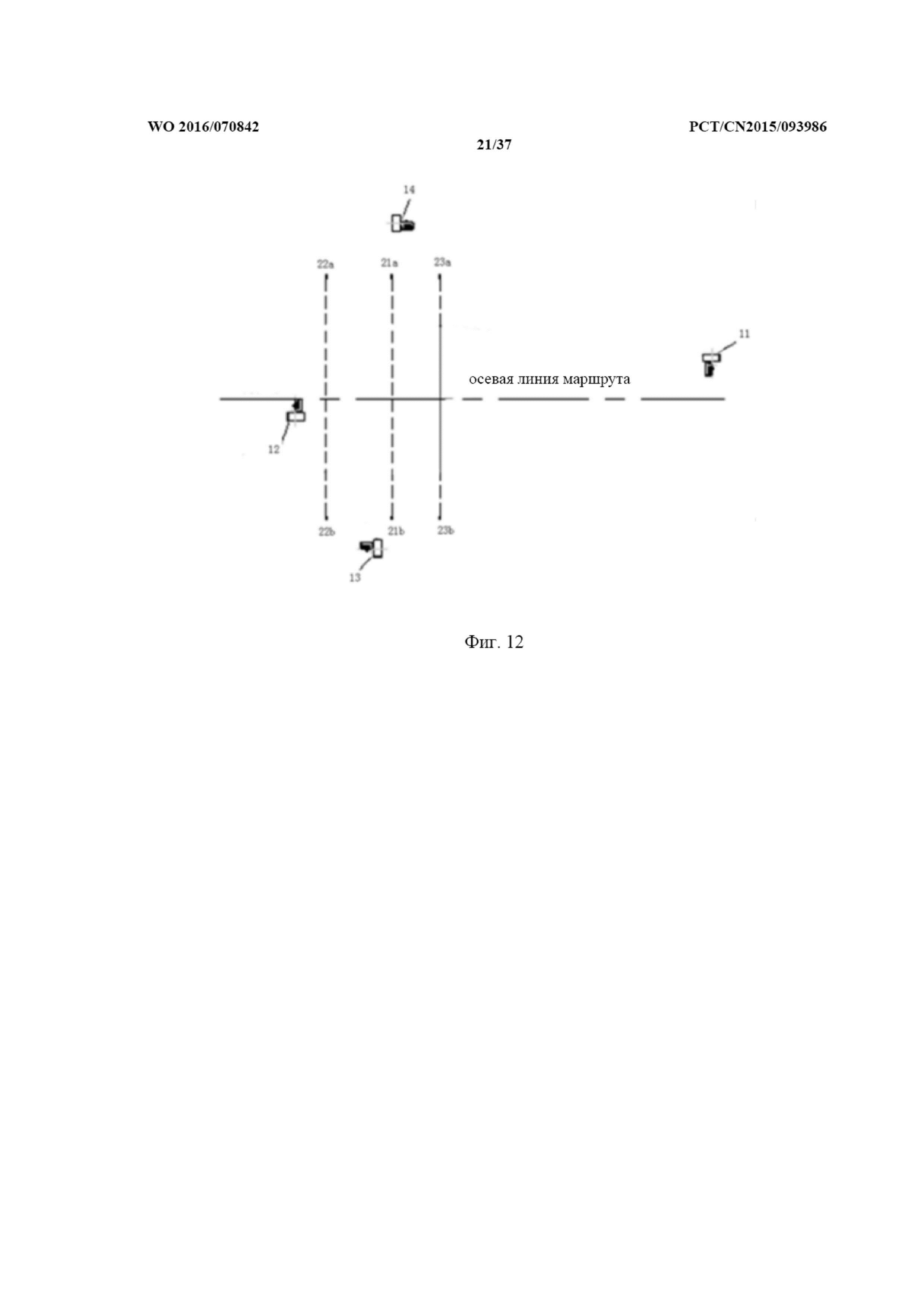
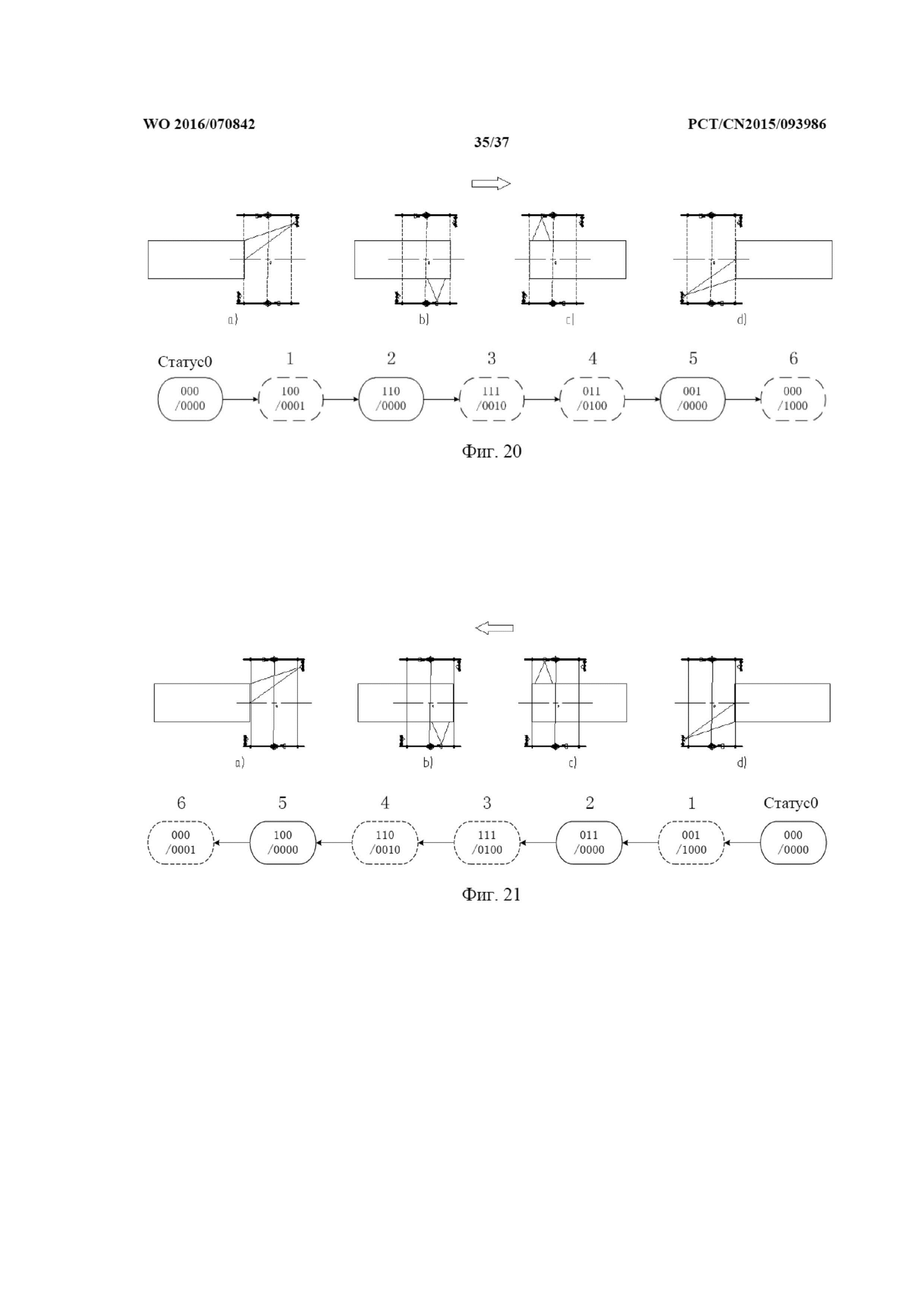
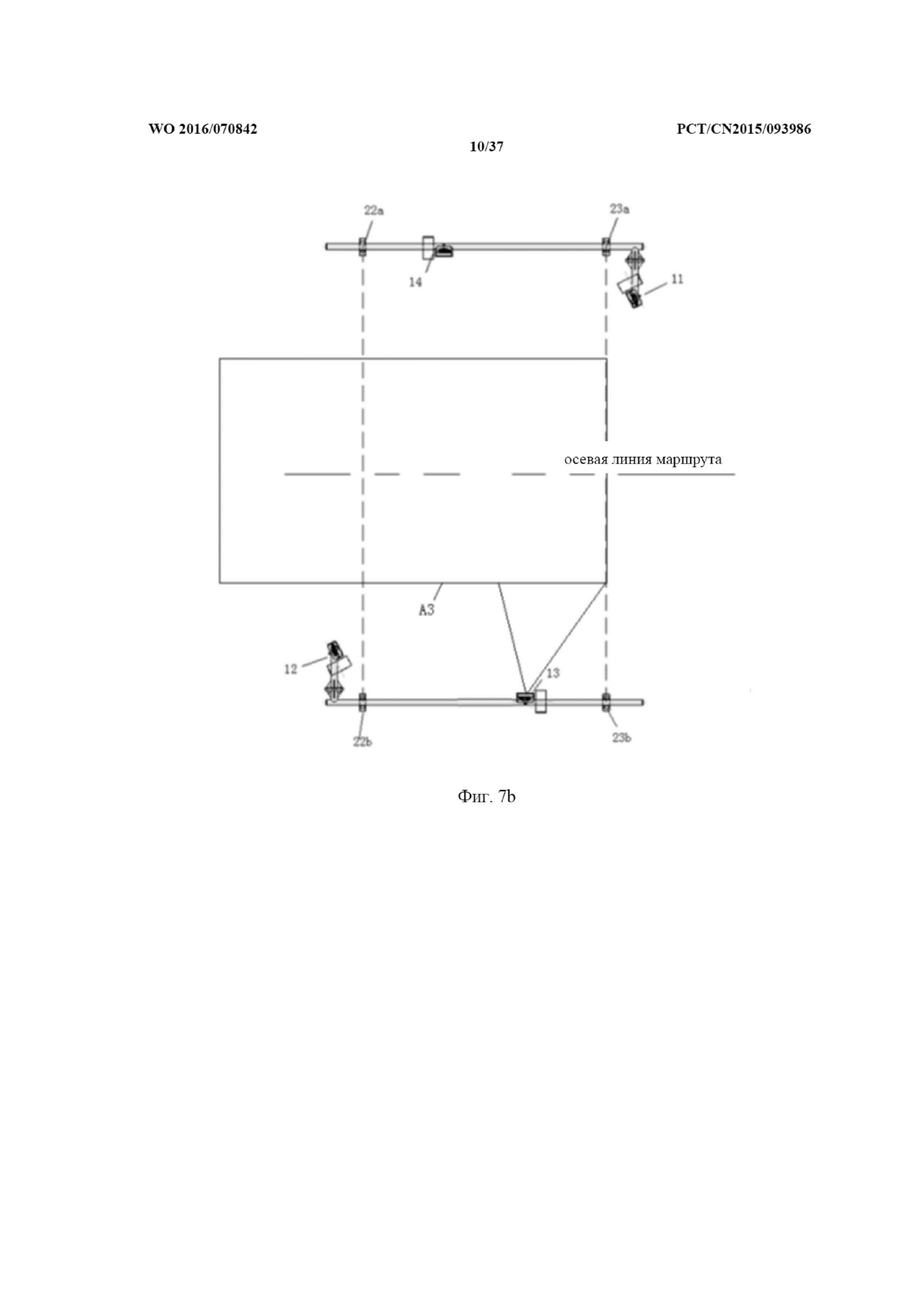
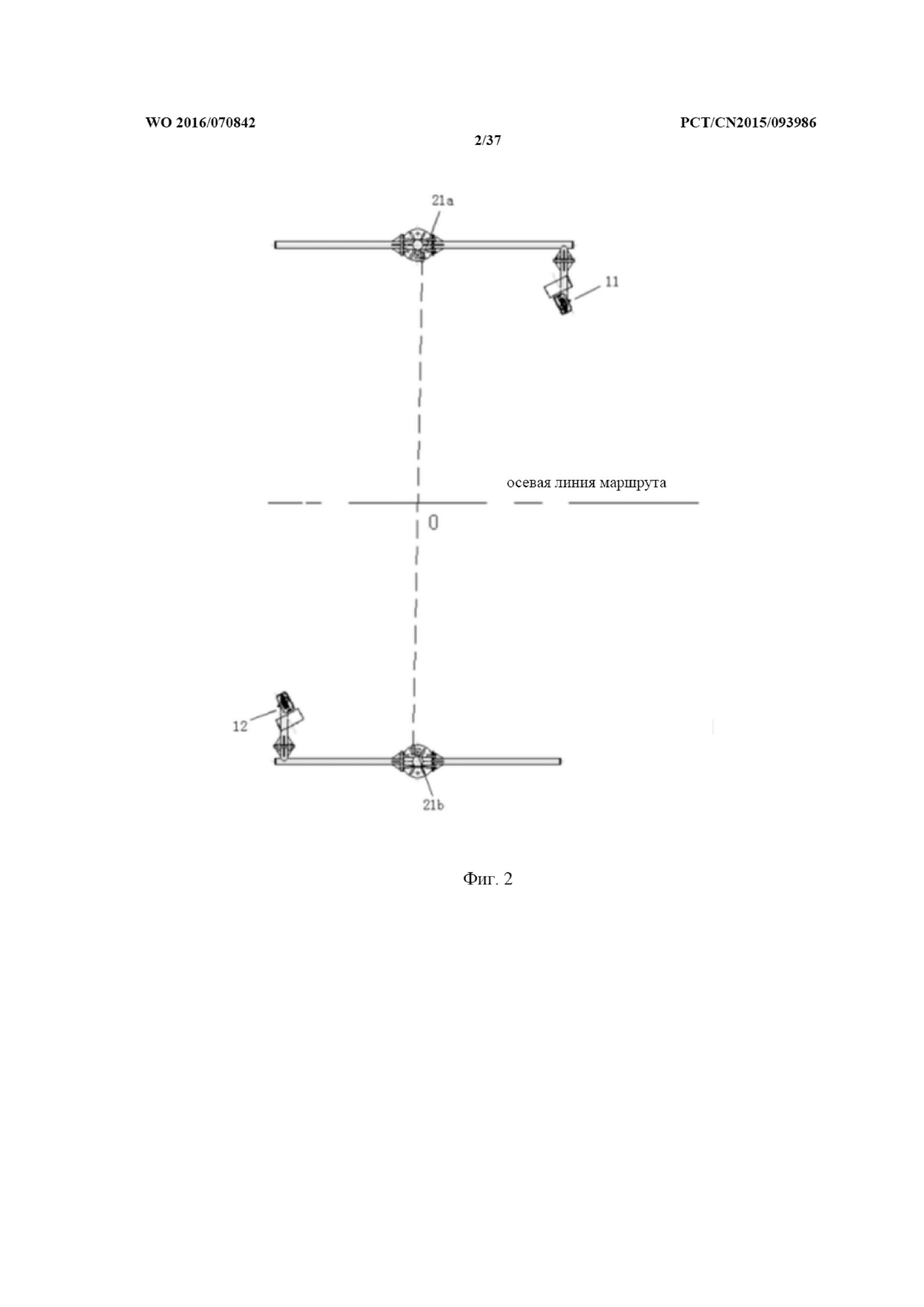
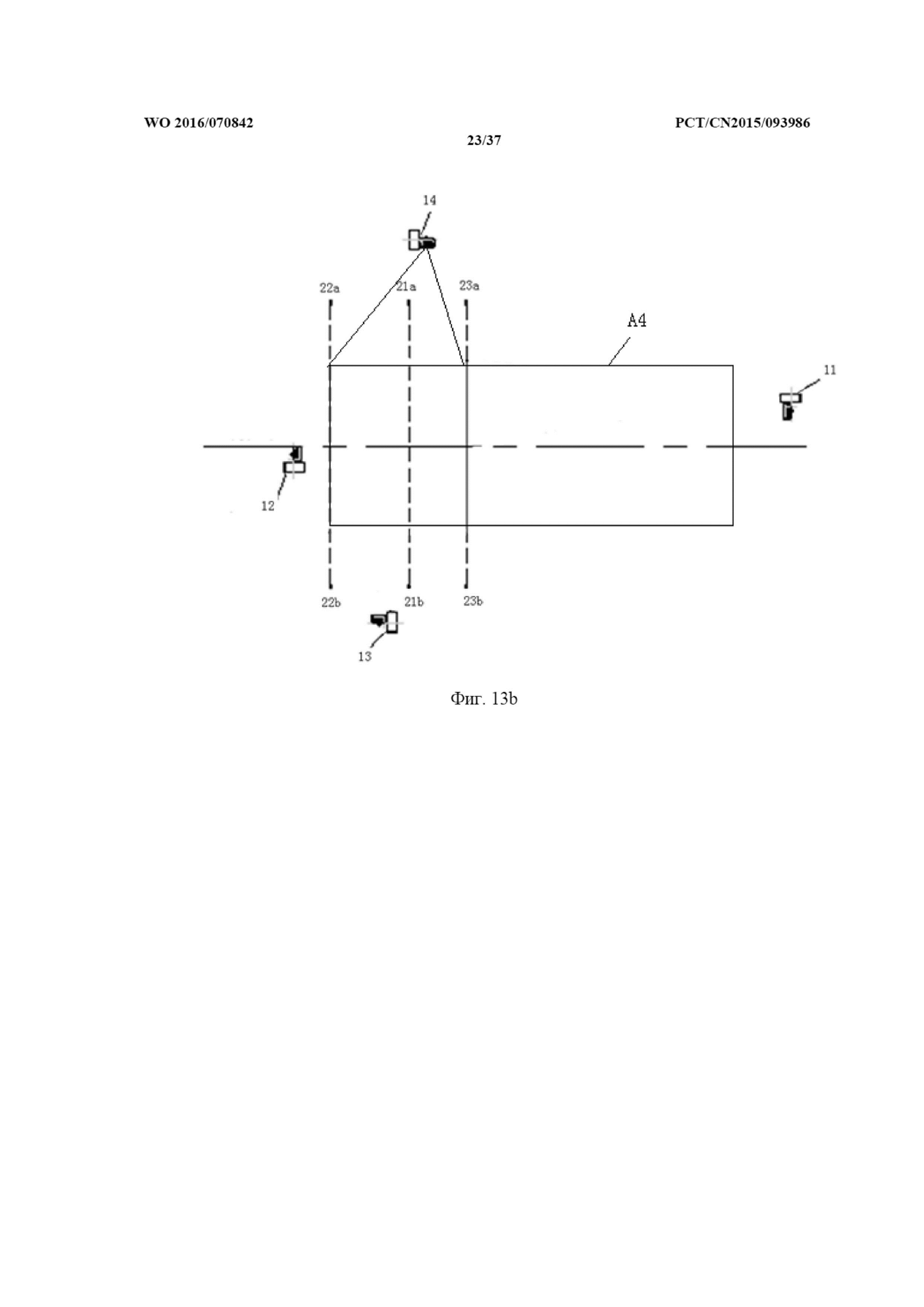
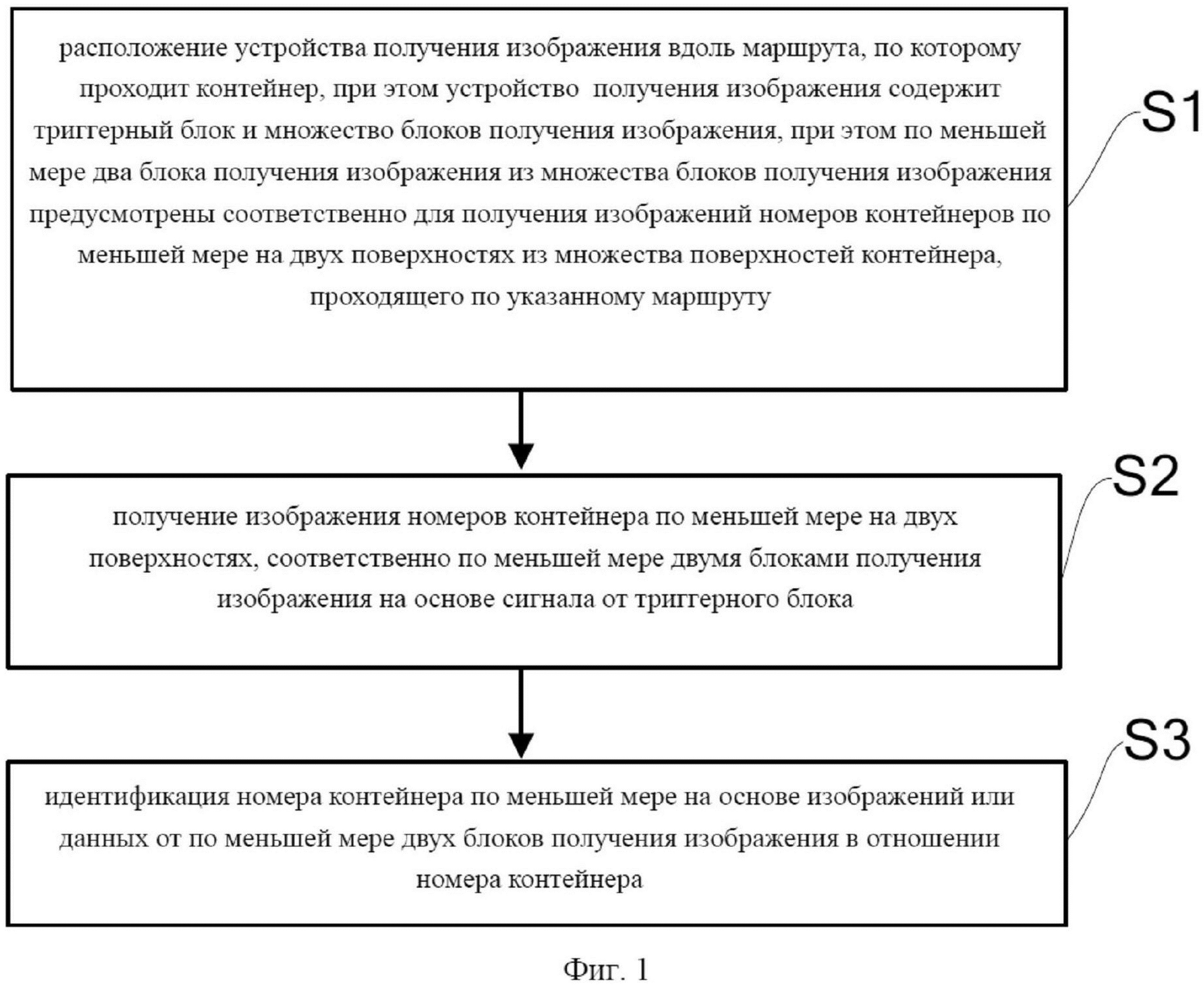
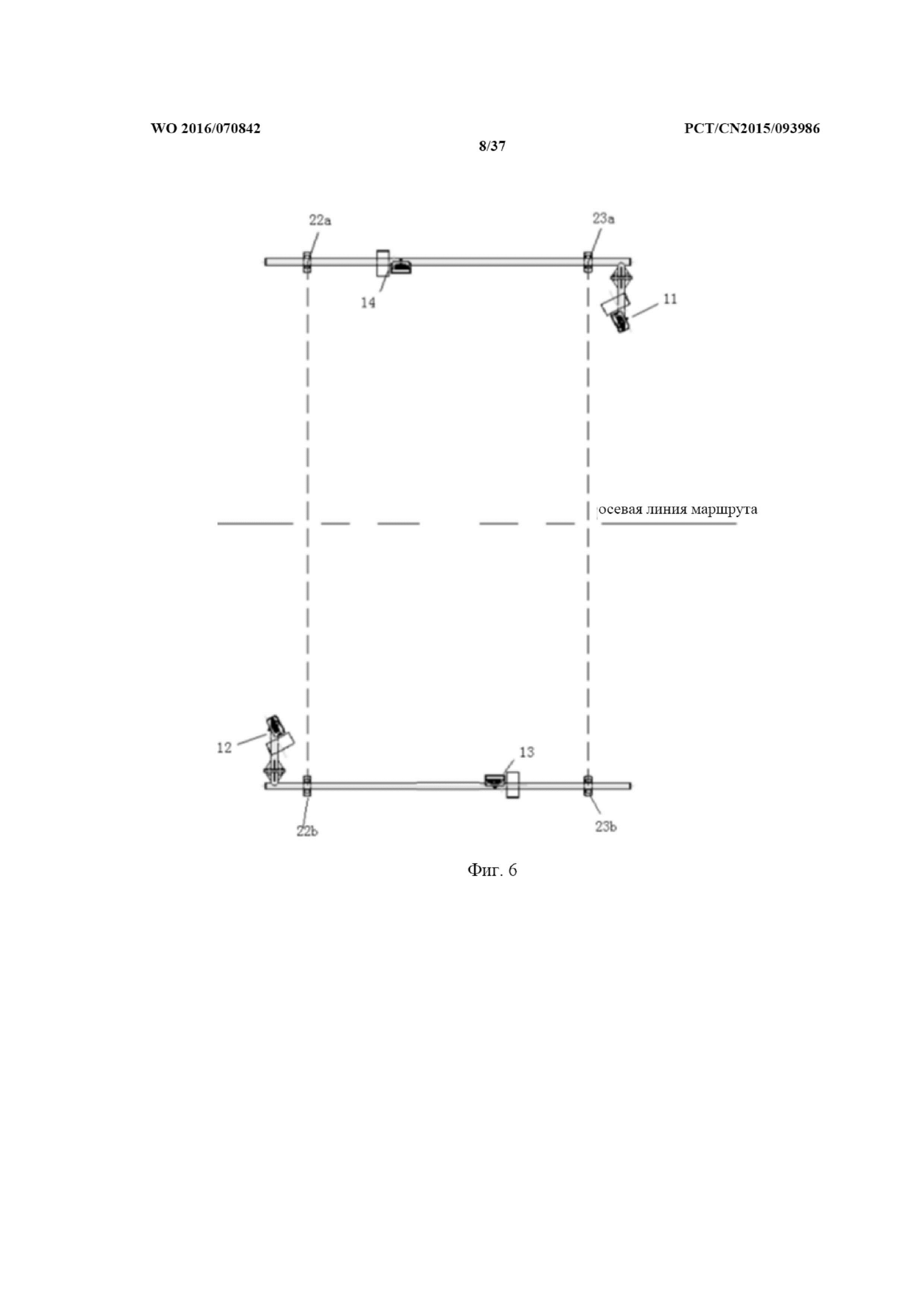
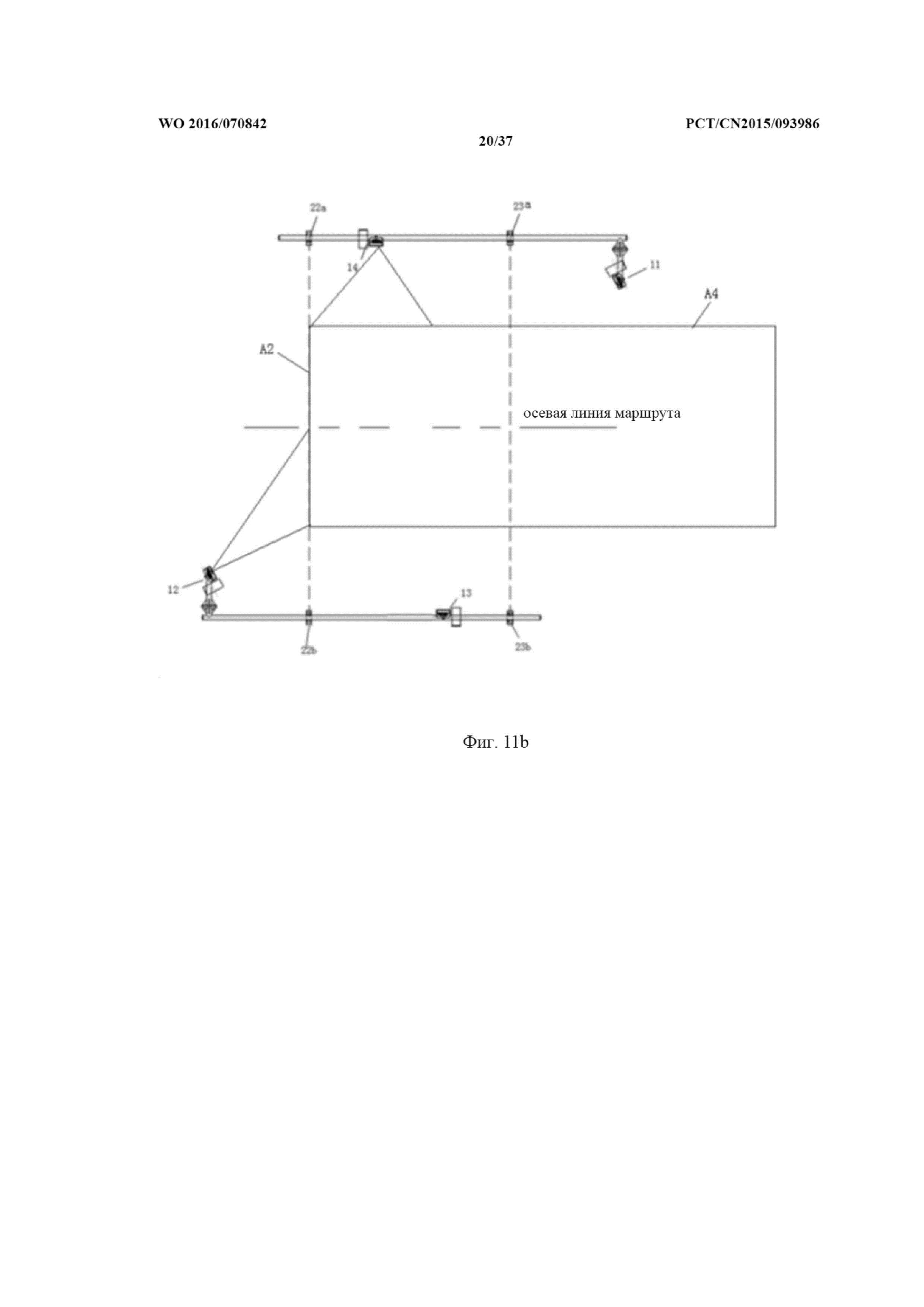
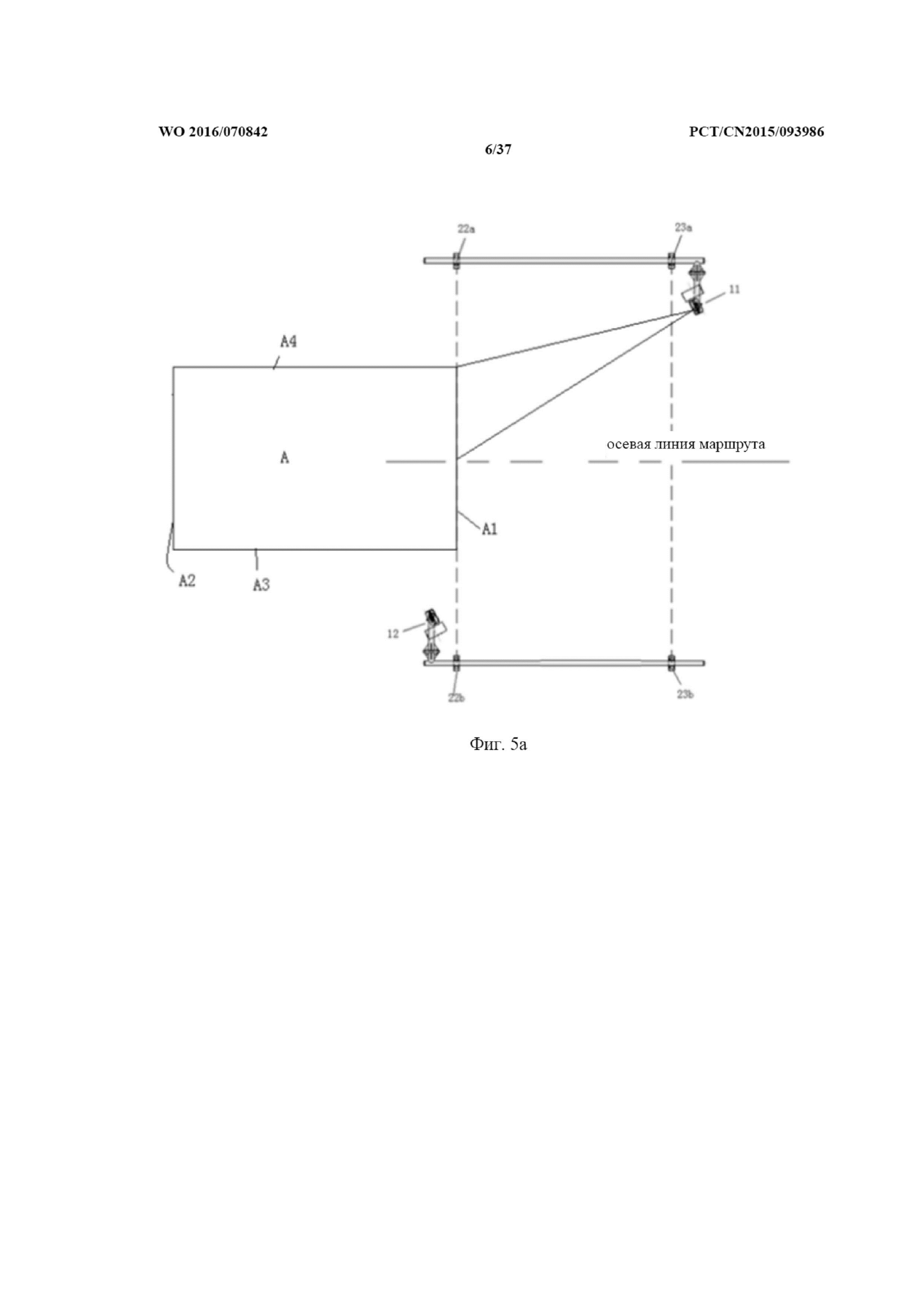
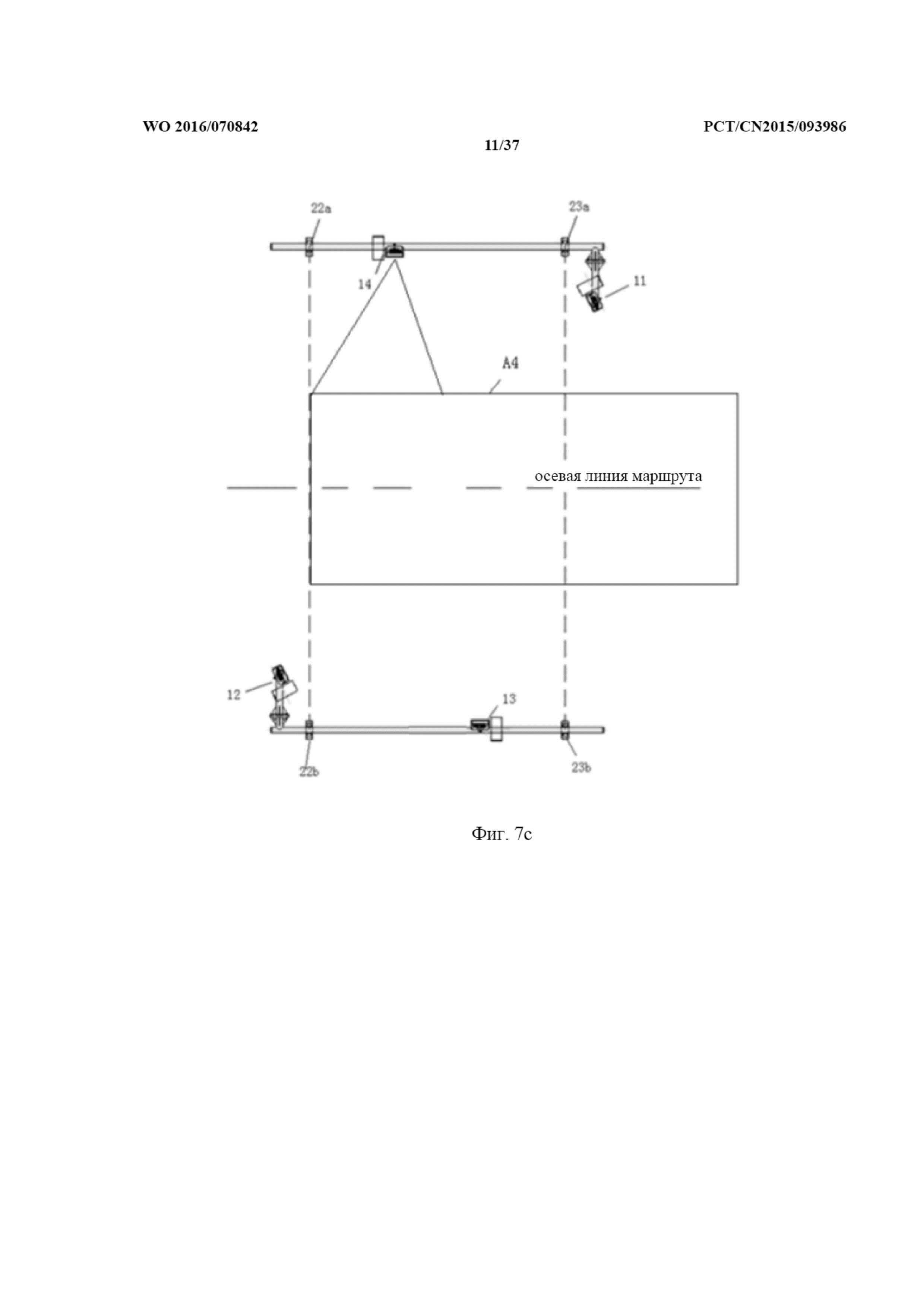
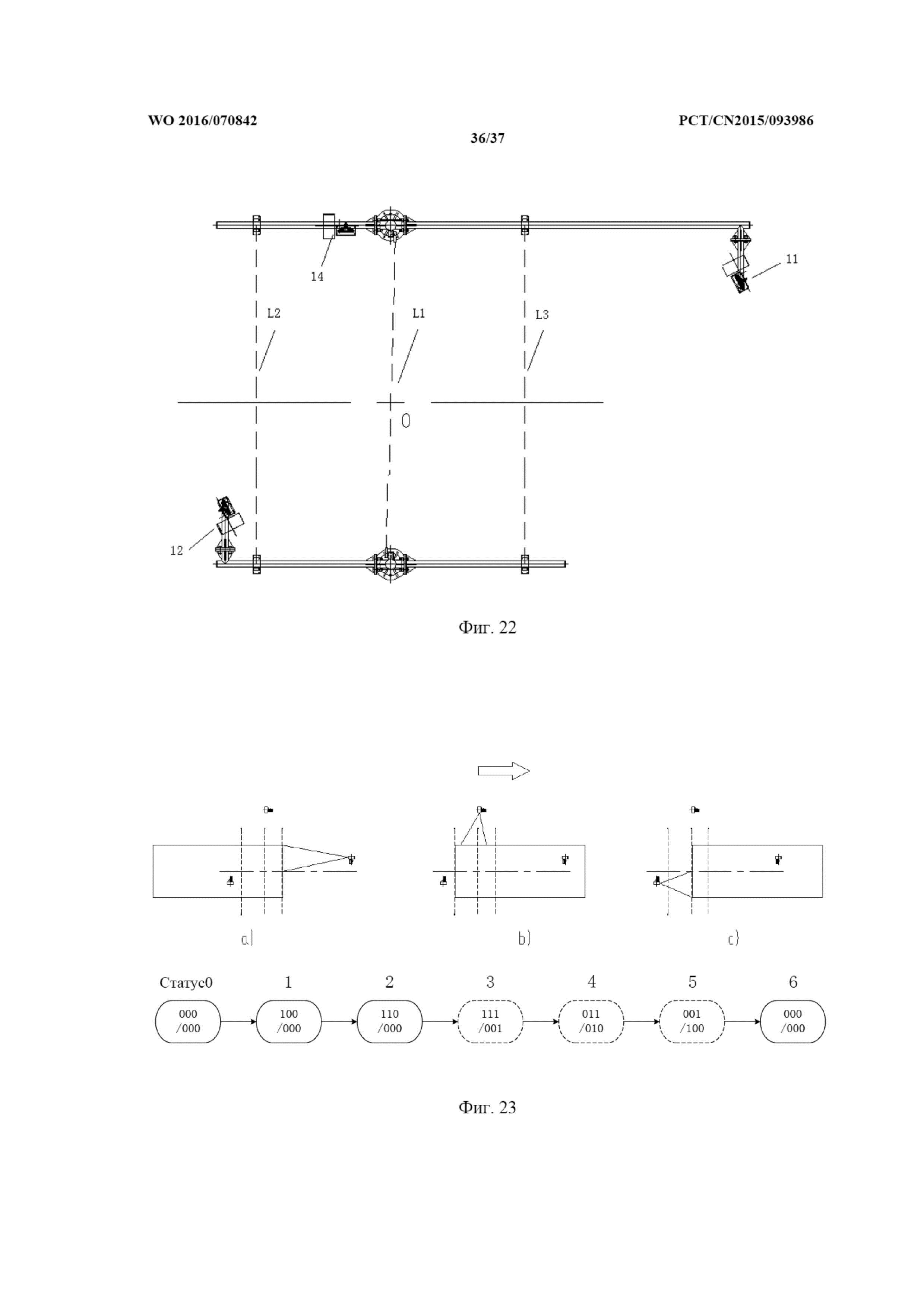
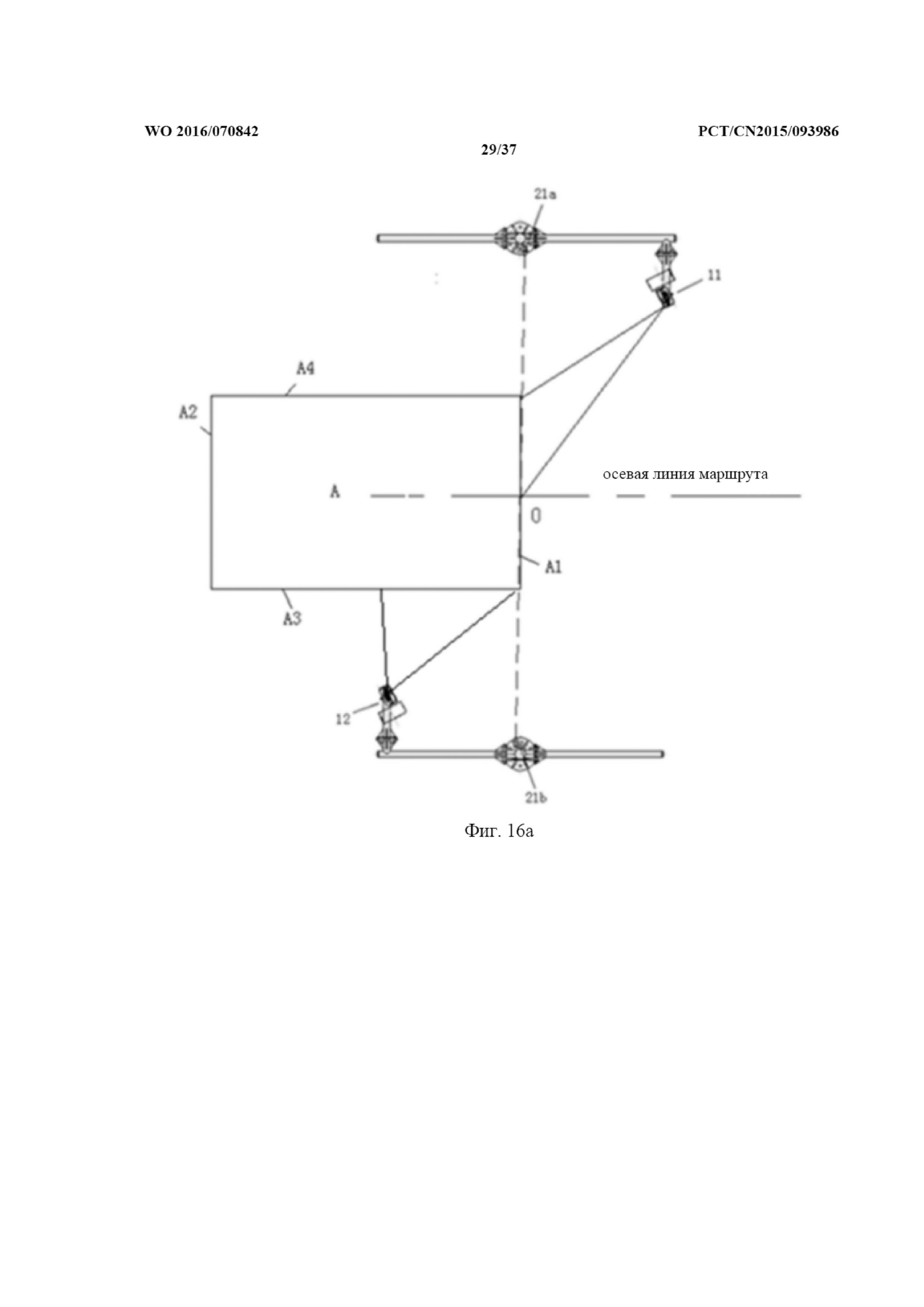
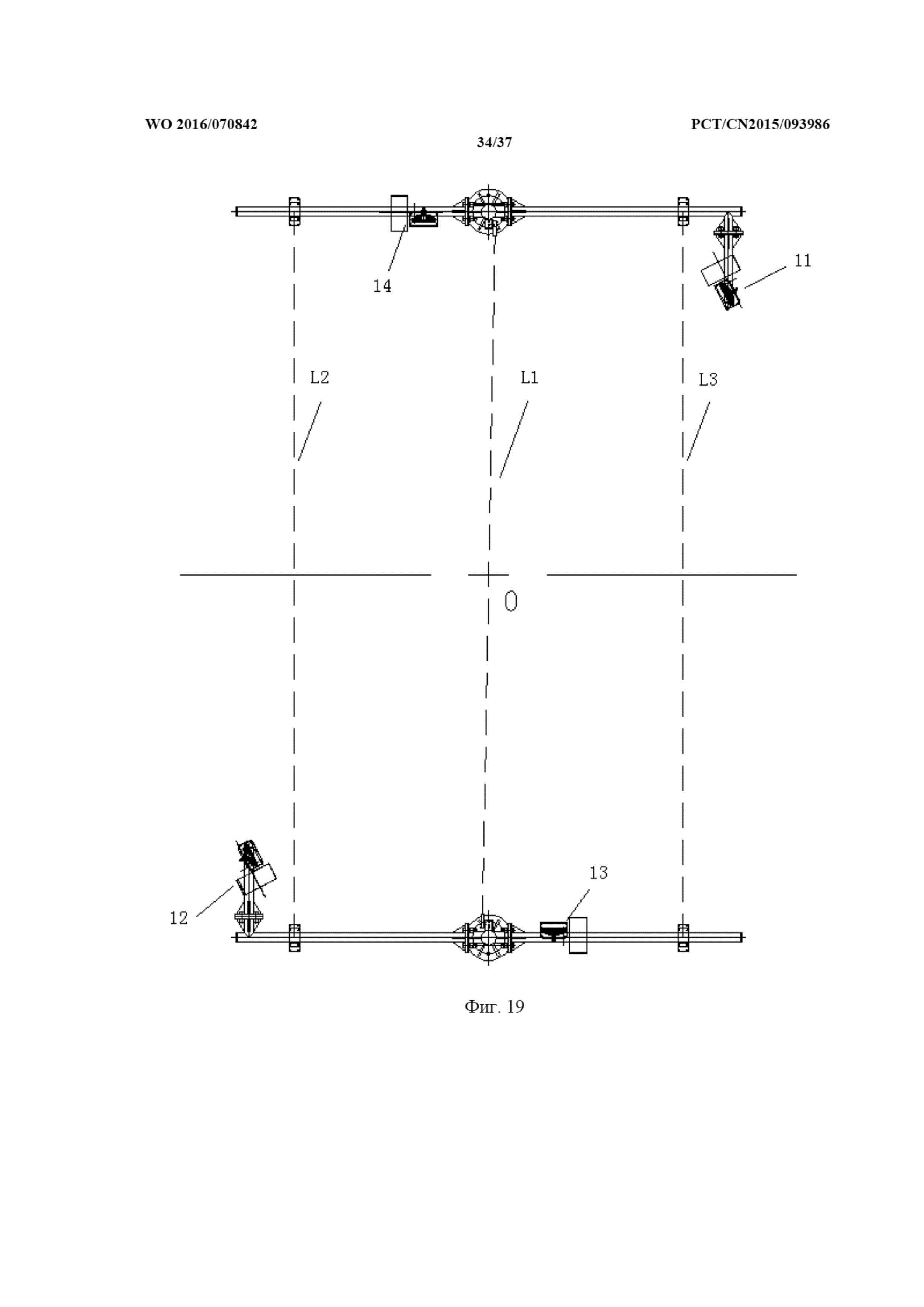
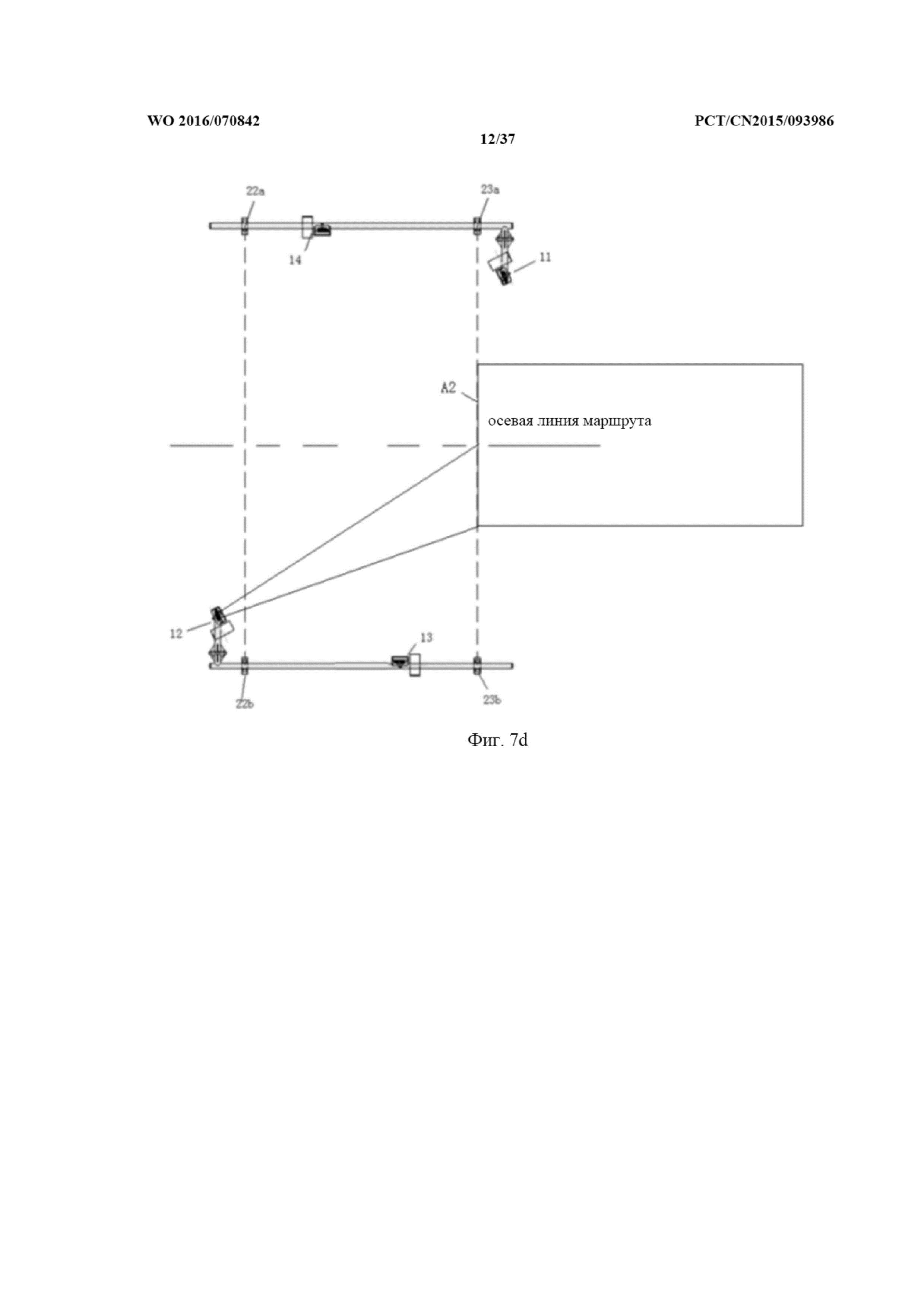
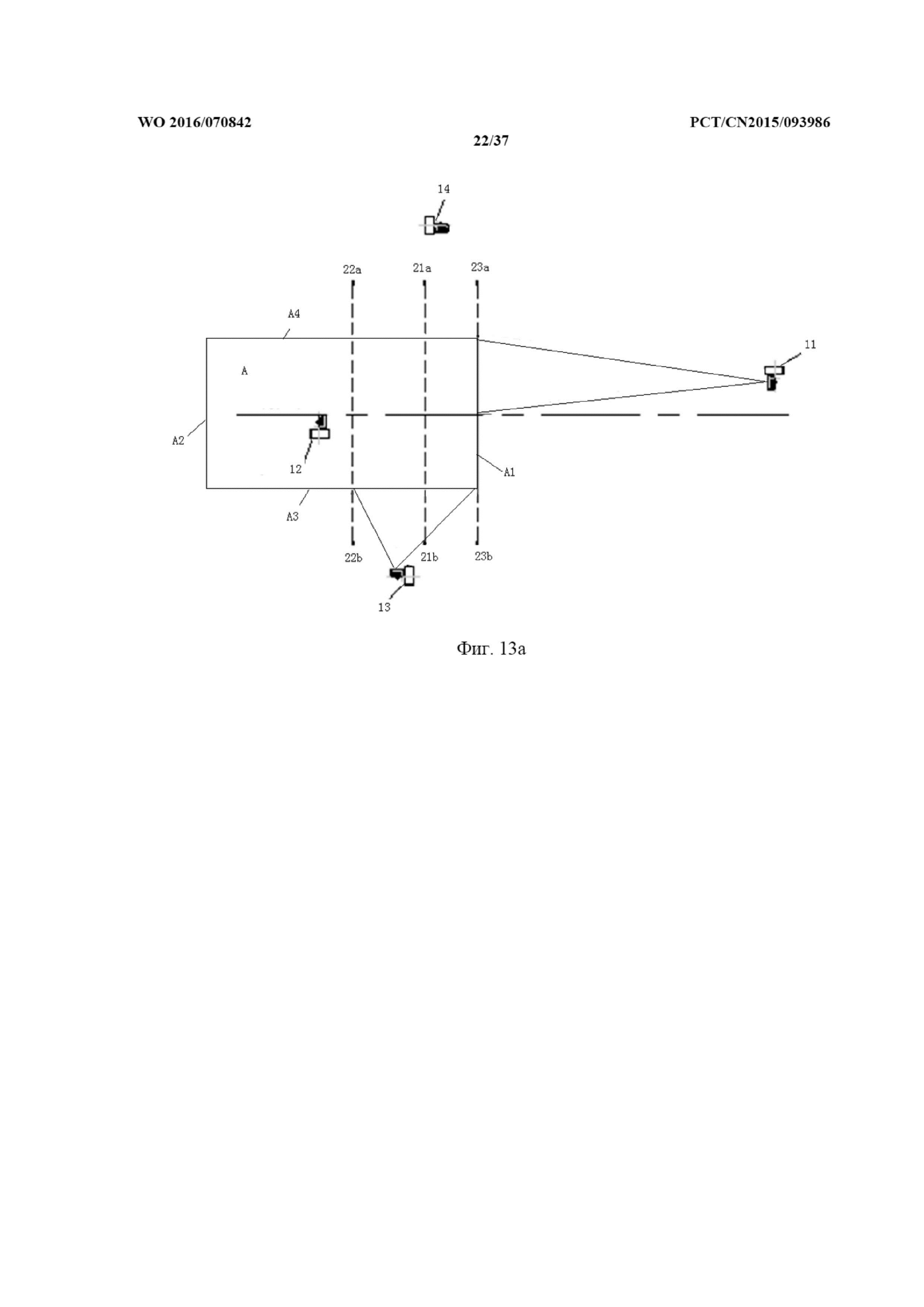
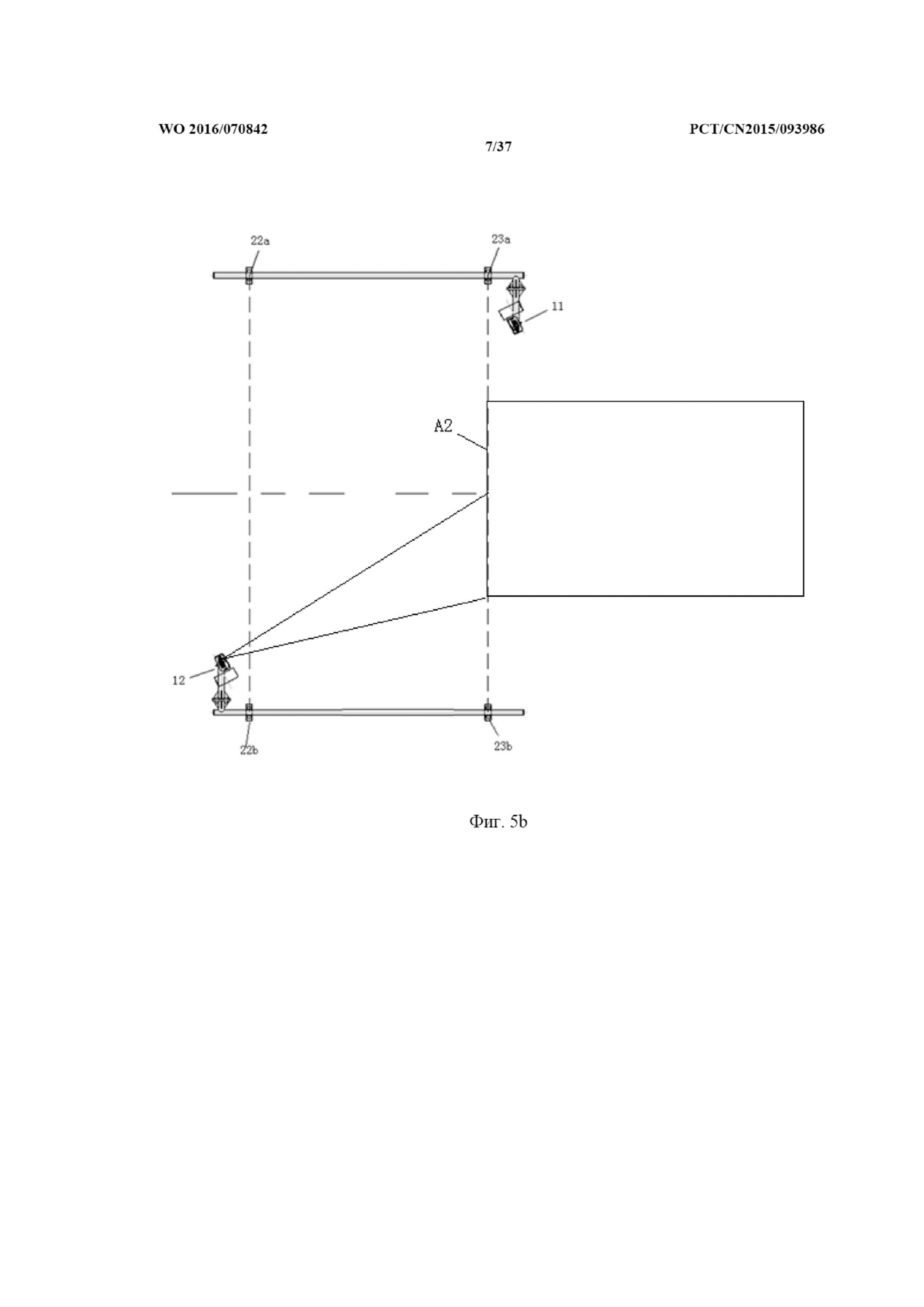
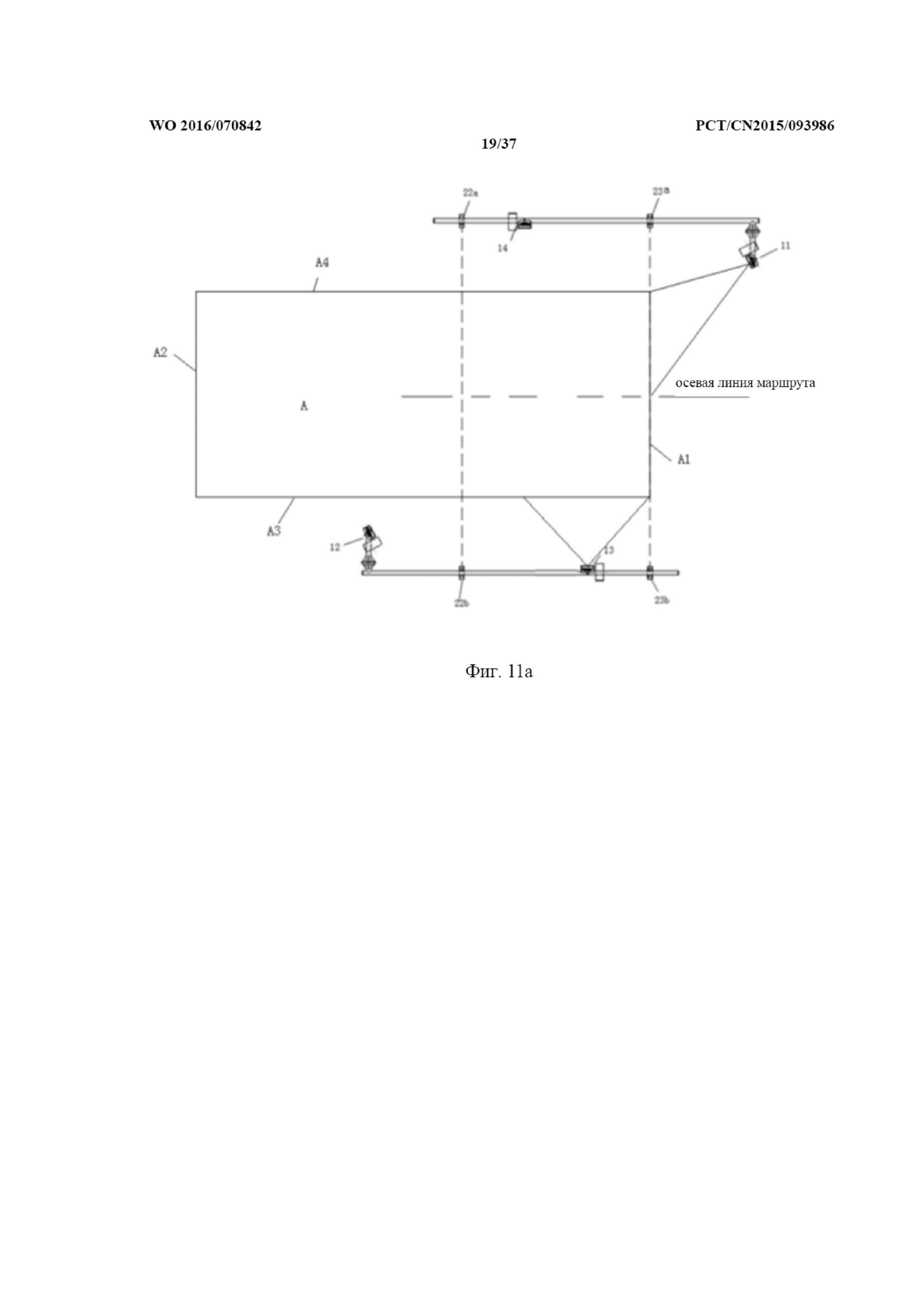
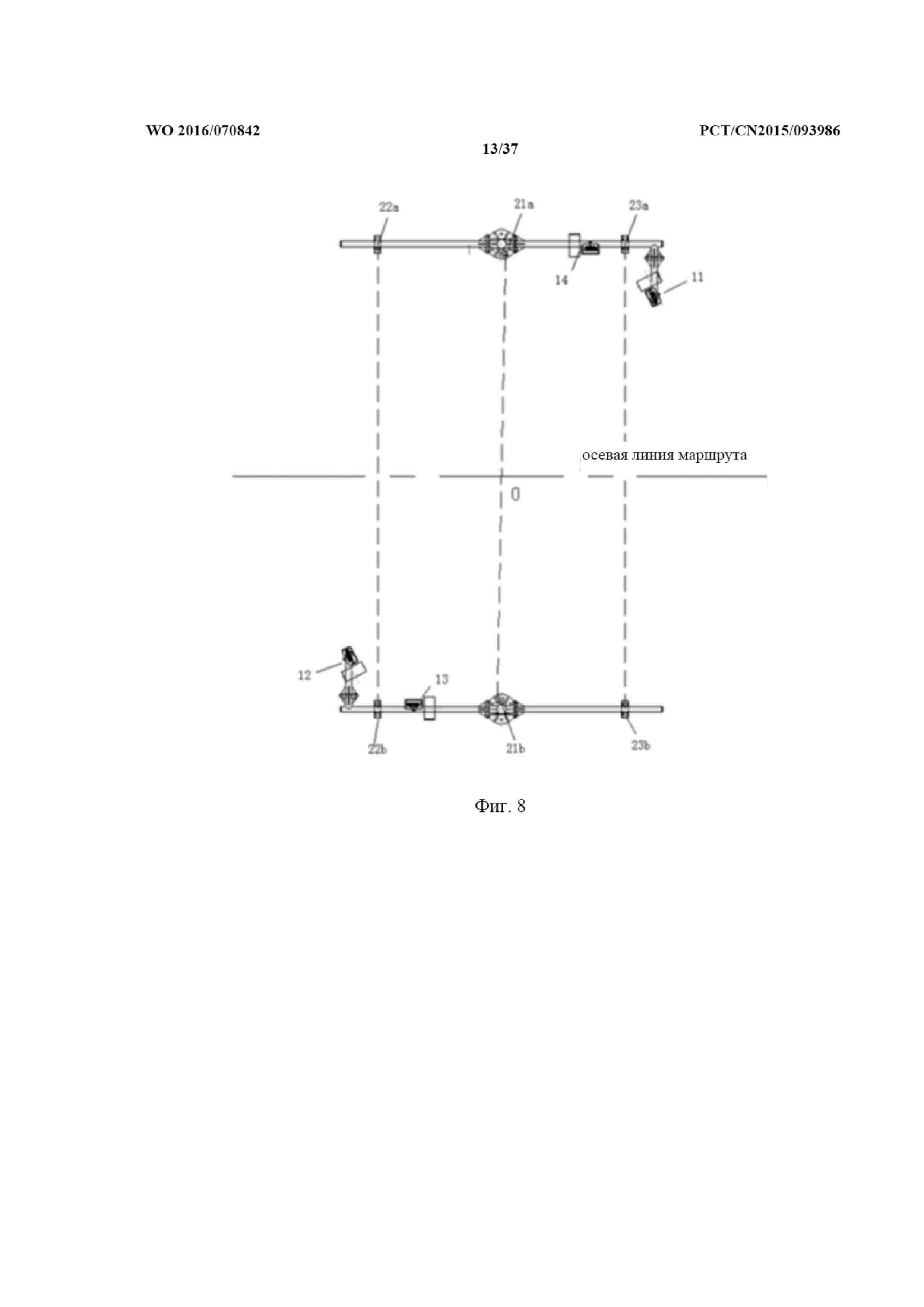
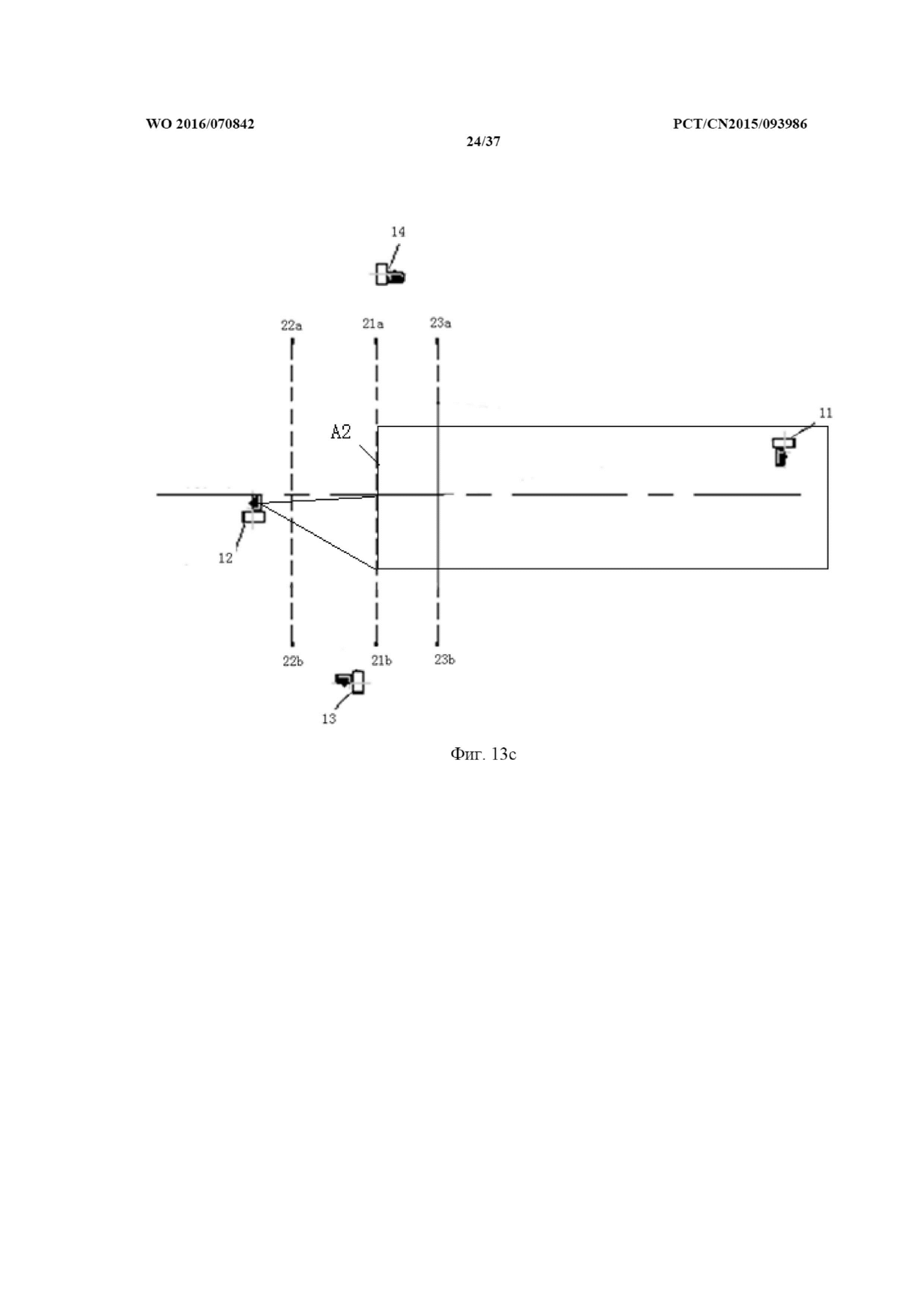
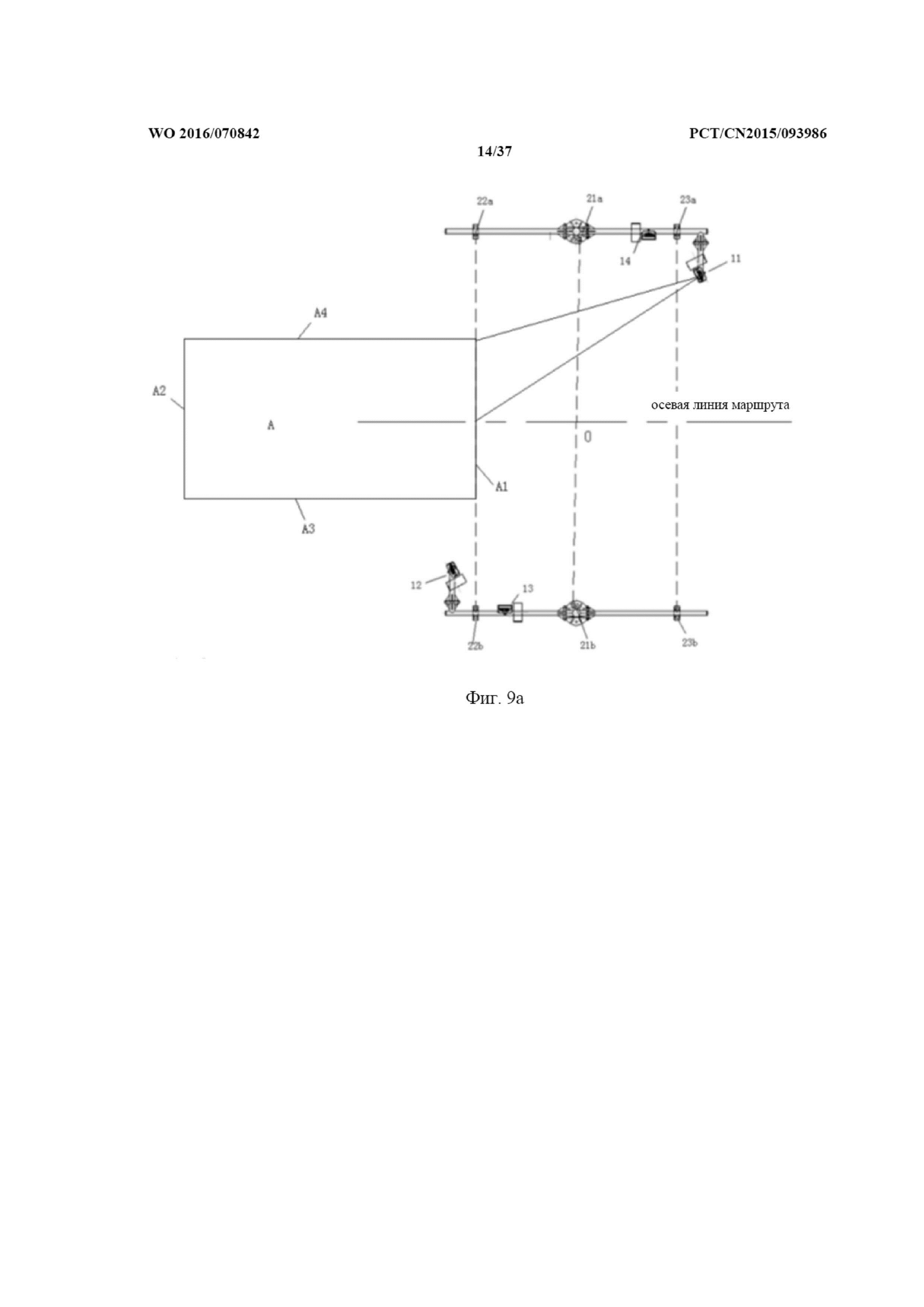
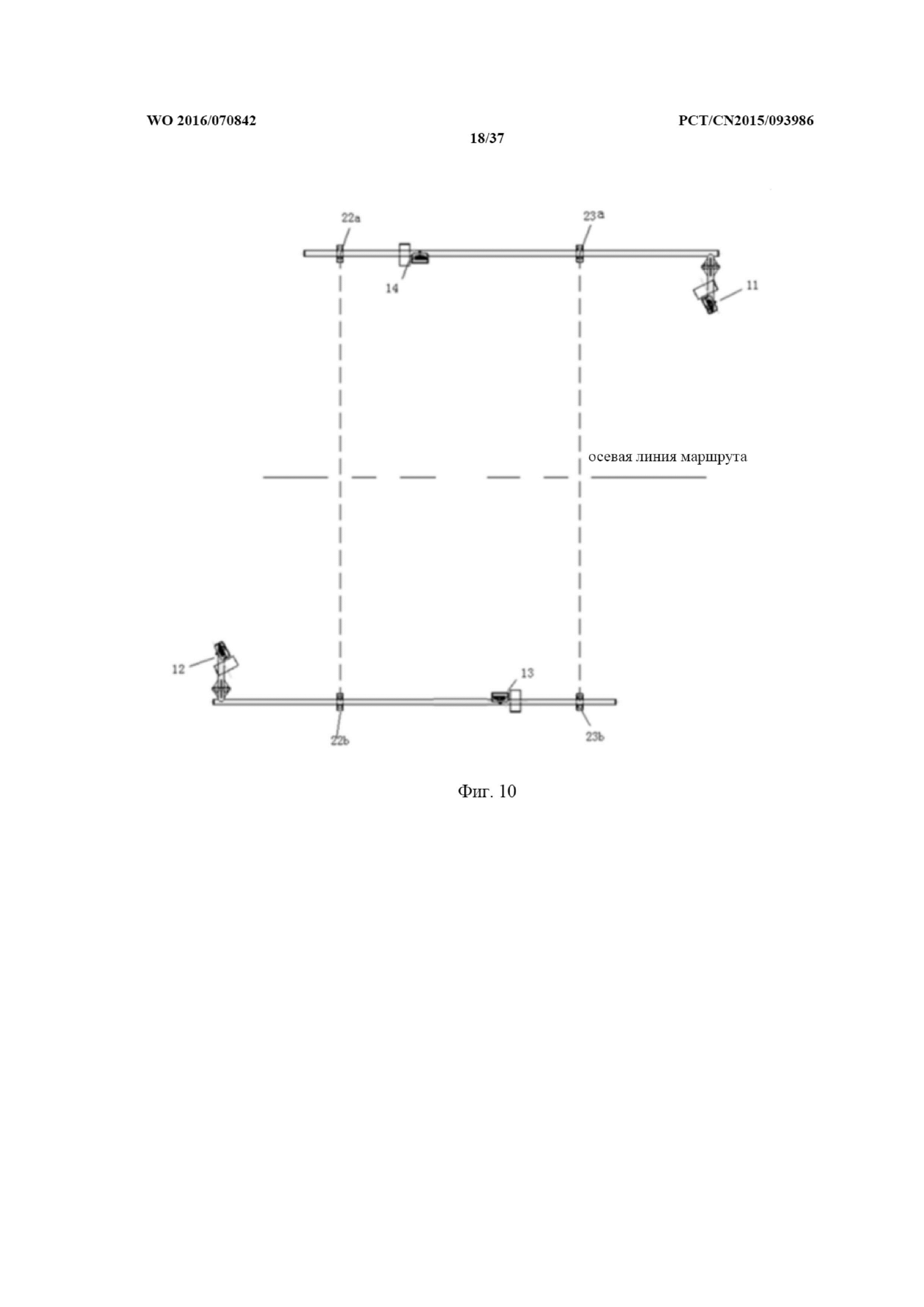
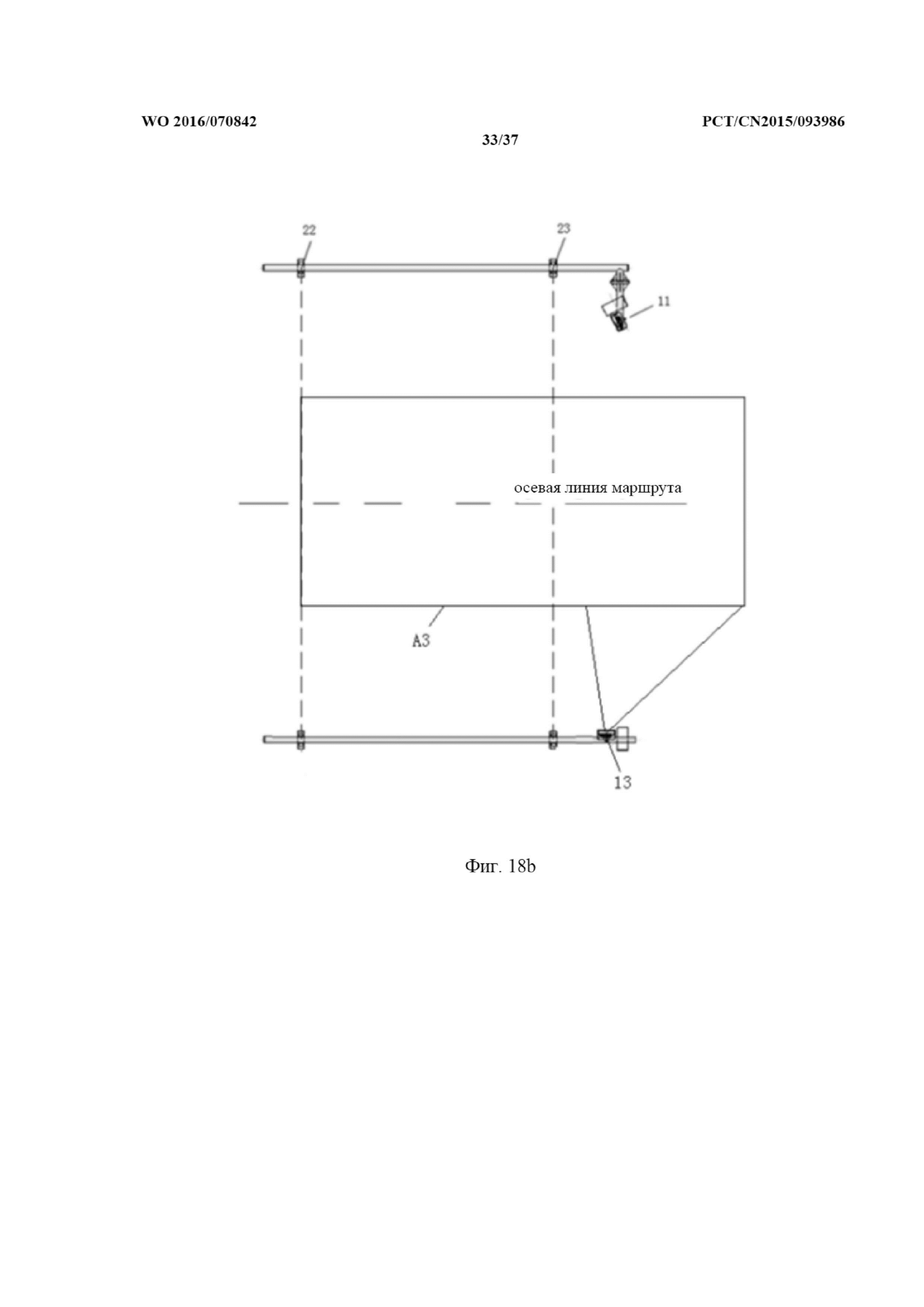
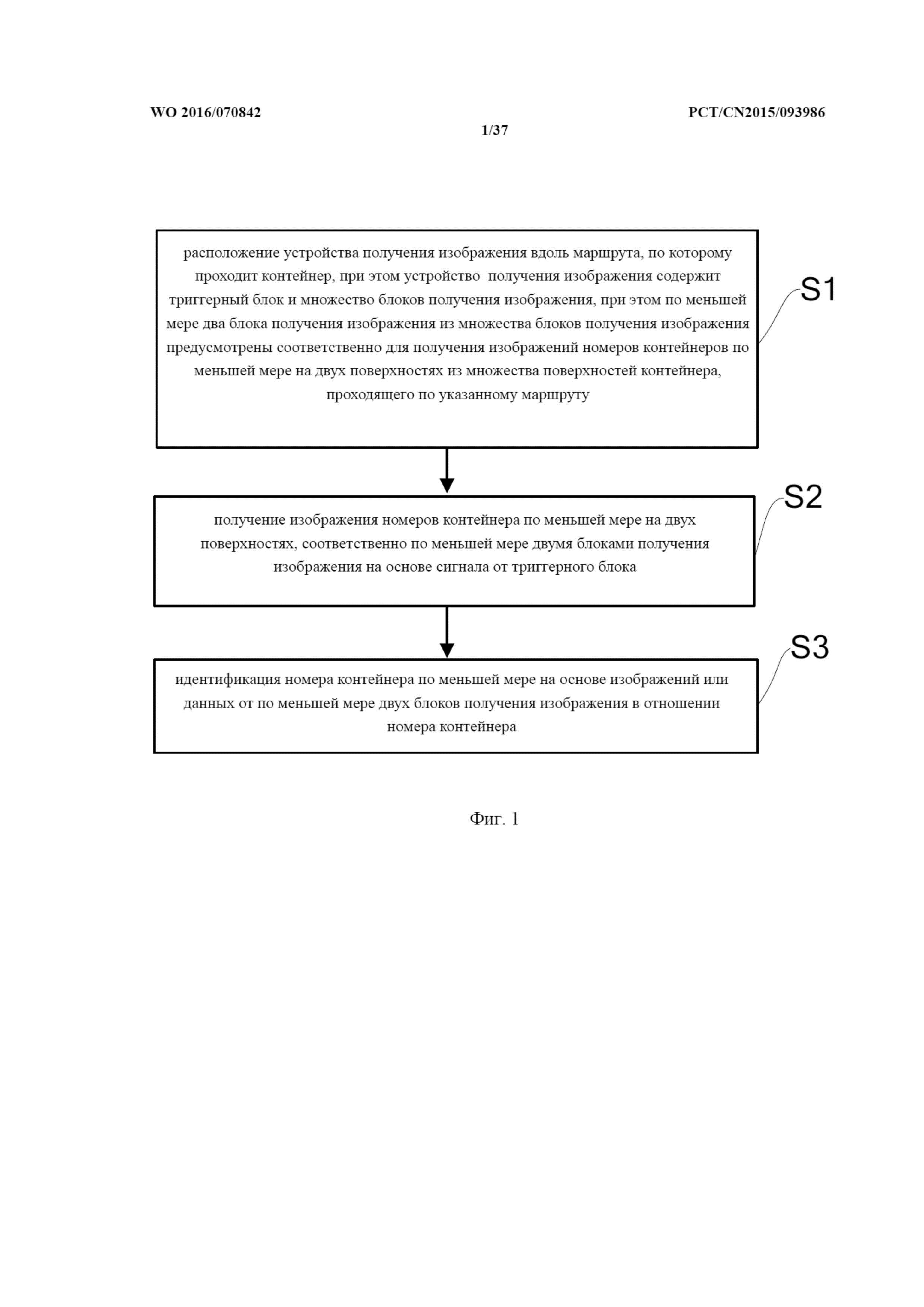
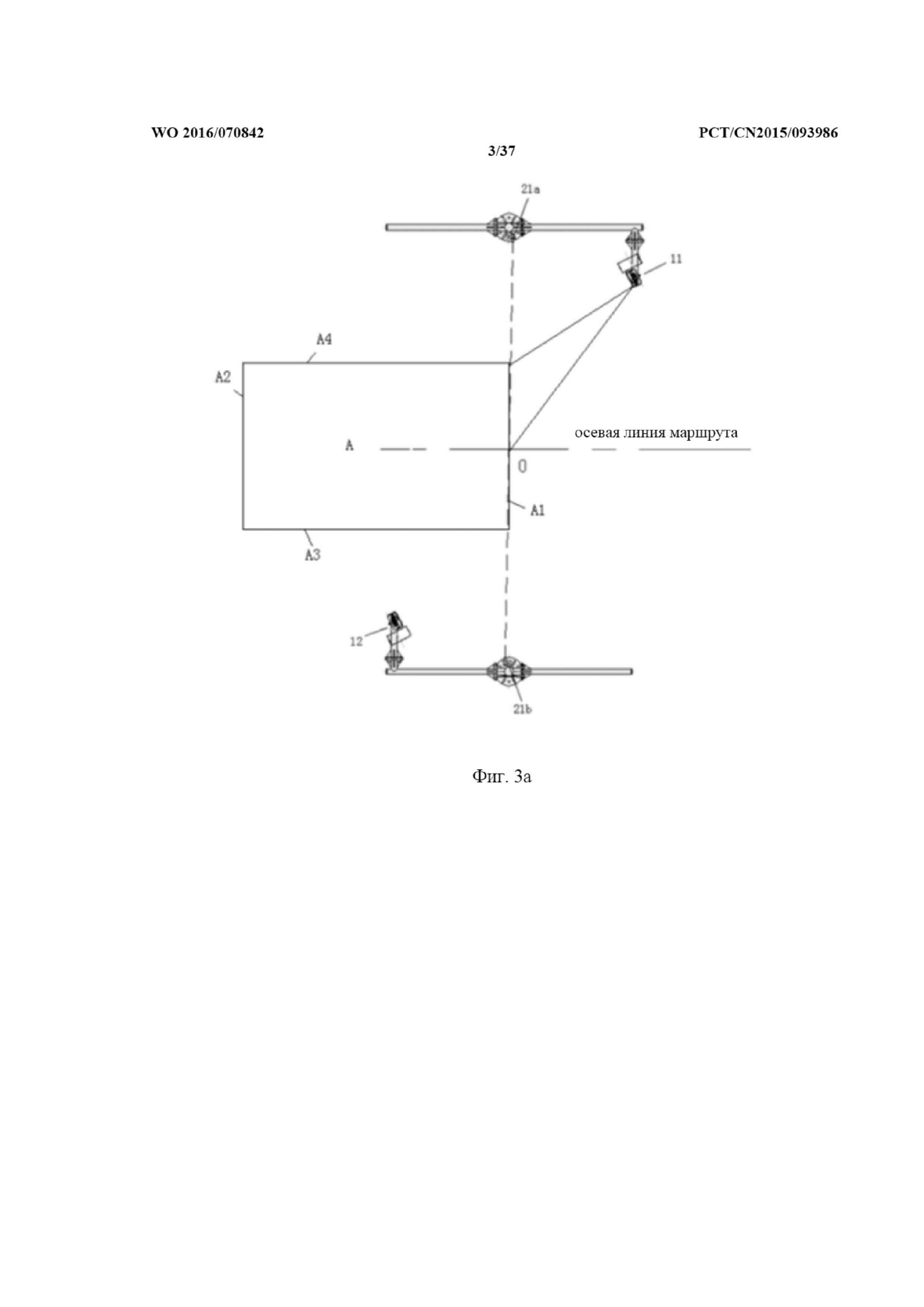
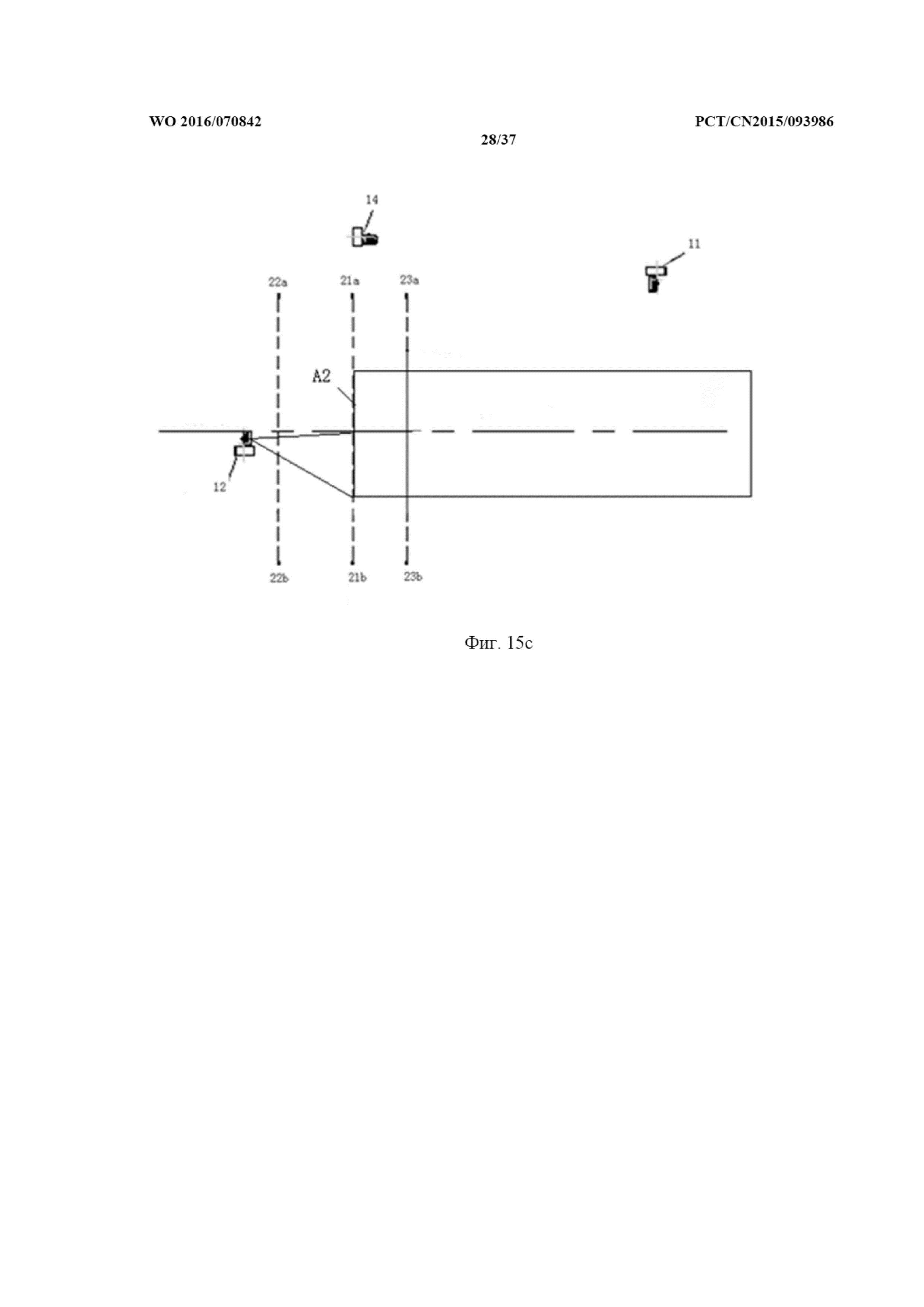
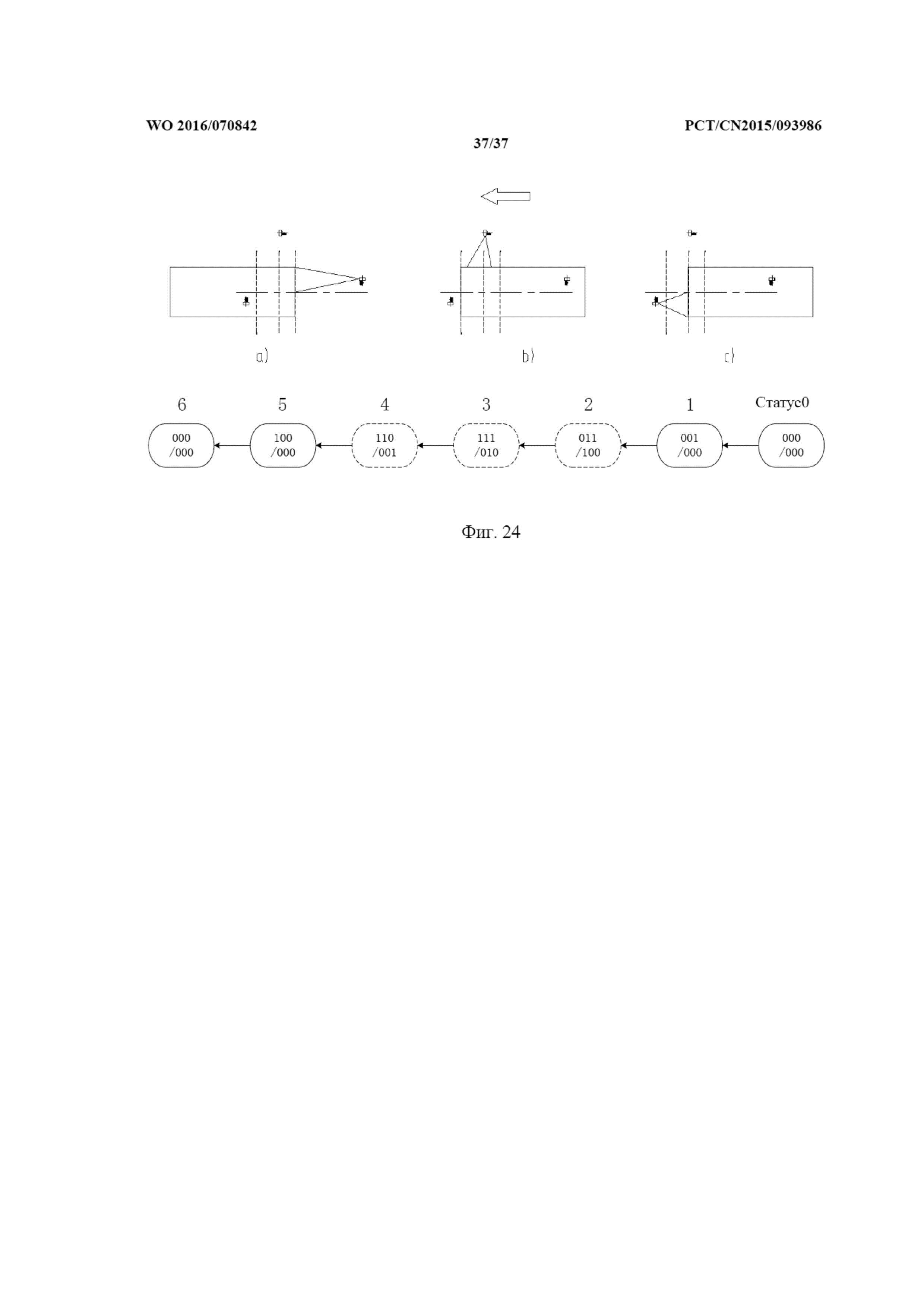
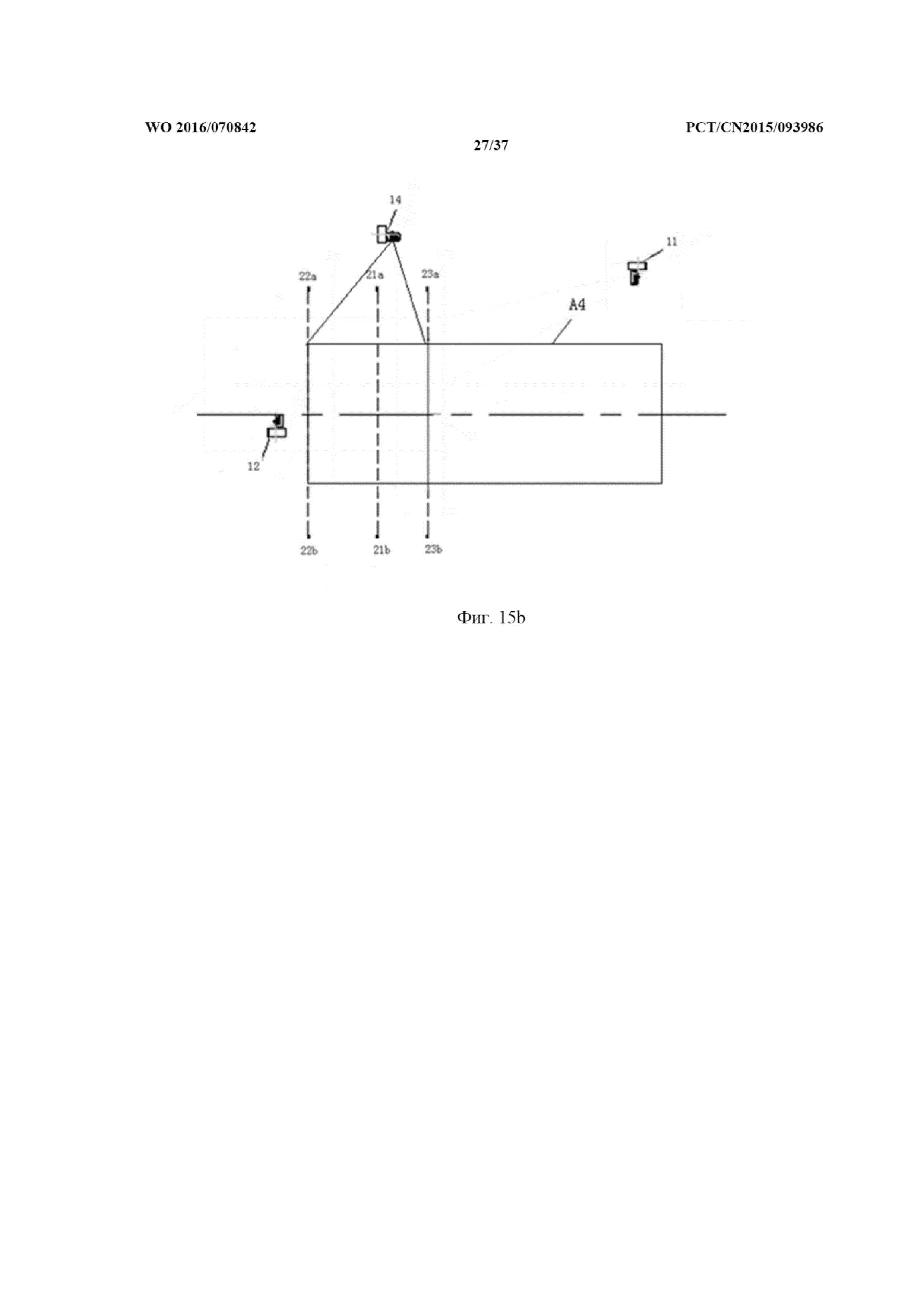
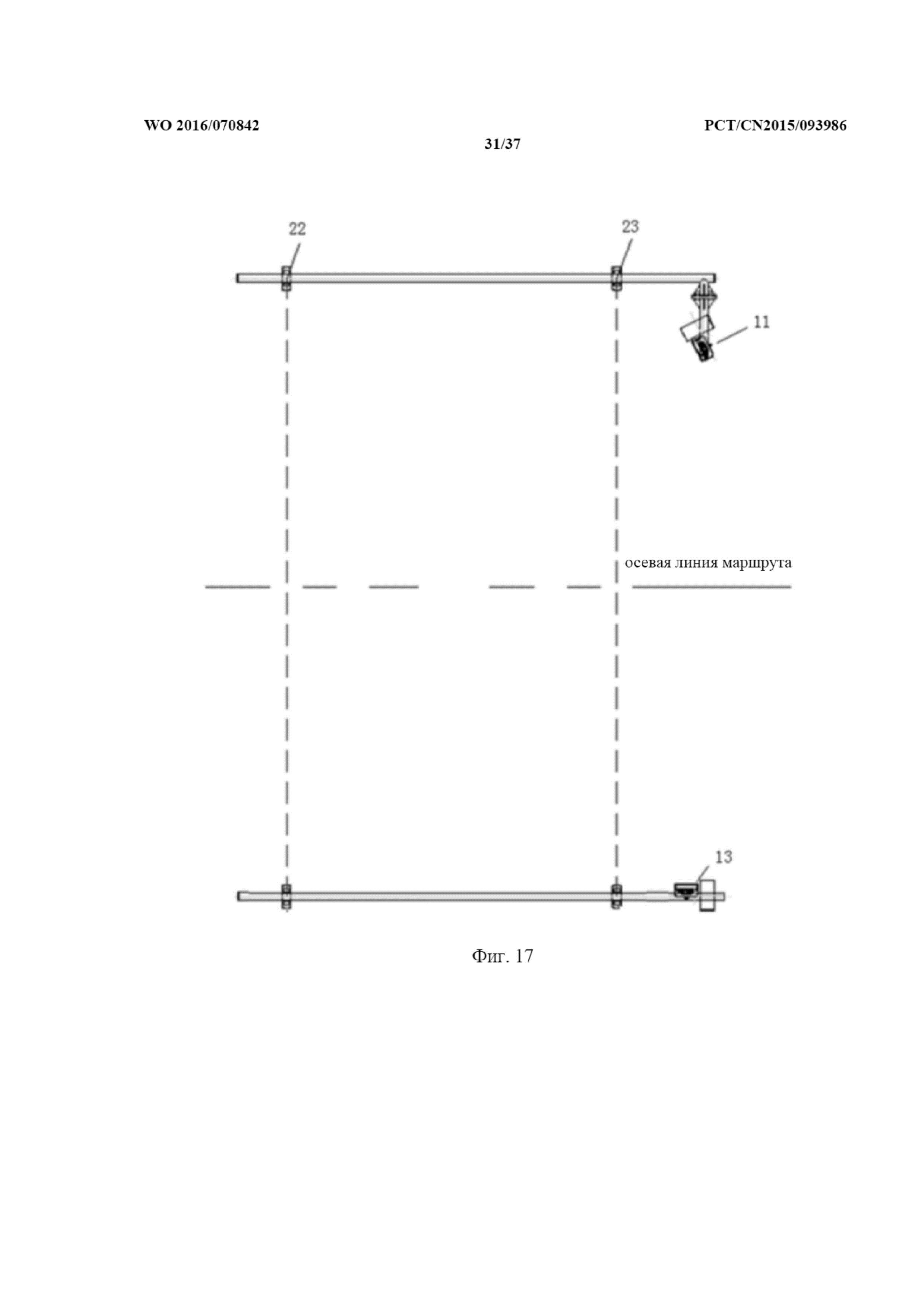
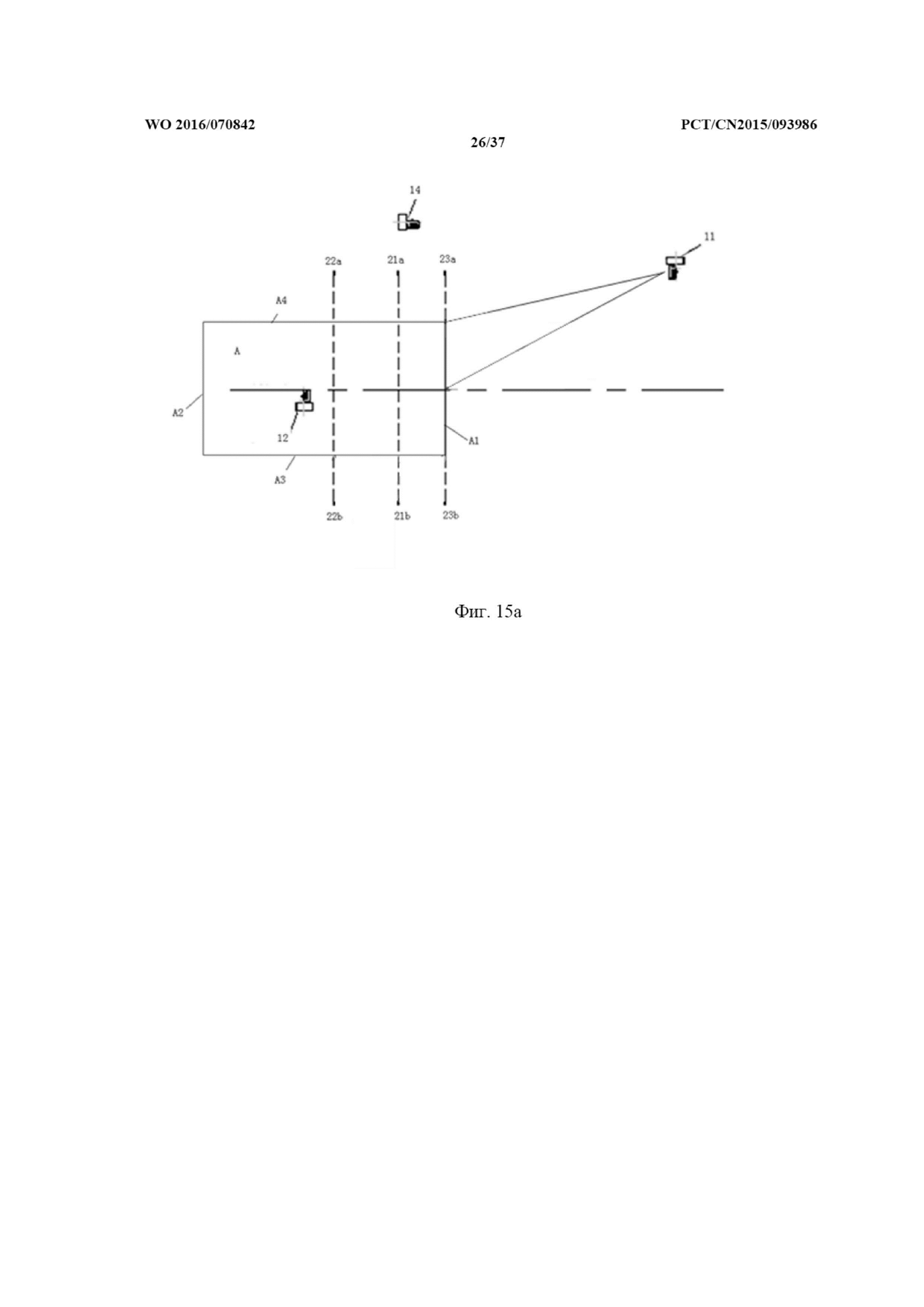
Устройство рентгеновского излучения и кт-оборудование, содержащее его
Устройство рентгеновского излучения и кт-оборудование, содержащее его
Устройство и способ для генерирования выровненного поля рентгеновского излучения
Рентгеновский генератор с регулируемой коллимацией
Устройство рентгеновского излучения и кт-оборудование, содержащее его
Устройство рентгеновского излучения и кт-оборудование, содержащее его
Узел коронного разряда, спектрометр на основе подвижности ионов и способ осуществления коронного разряда
Способ обработки изображений, устройство обработки изображений и носитель данных
Устройство в виде рентгеновской трубки и пружинный контакт
Линейный ускоритель электронов на стоячей волне и система досмотра контейнеров/транспортных средств
Способ и система быстрого досмотра транспортного средства
Система управления направлением движения транспортного средства, способ для ориентирования транспортного средства и инспекционное транспортное средство
Способ и устройство для отслеживания состояния движущегося объекта и система для быстрой инспекции транспортного средства
Способ и система для идентификации номера и типа вагона и способ и система для инспекции безопасности

