УСТРОЙСТВО КОМПЕНСАЦИИ СКОРОСТИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ
Вид РИД
Изобретение
Предлагаемое устройство относится к области радиолокационной техники и может быть использовано при построении помехозащищенных когерентно-импульсных РЛС (одночастотных и двухчастотных) с перестройкой частоты излучения, предназначенных для установки на движущийся платформе (корабле, самолете и т.п.).
Известны устройства, позволяющие вводить поправку в частоту или фазу опорного сигнала радиолокатора с внутренней когерентностью для компенсации эффекта собственного движения (см., например, П.А. Бакулев, Радиолокация движущихся целей, Сов. радио, М., 1964 г., стр. 179, авторское свидетельство СССР №1840875 за 1977 г.).
Блок поправок, описанный в книге П.А. Бакулева «Радиолокация движущихся целей», Сов. радио, М., 1964 г., стр. 179, рис. 261, содержит счетно-решающий прибор, на вход которого поступает информация о собственной скорости носителя РЛС, азимуте и угле места антенны РЛС, генератор частоты Допплера, управляющий вход которого соединен с выходом счетно-решающего прибора, когерентный гетеродин, фильтр и смеситель, выходы которого соединены с выходами когерентного гетеродина и генератора частоты Допплера, а выход - с фильтром, и позволяет компенсировать допплеровский сдвиг частоты, возникающий за счет собственного движения и сканирования луча антенны РЛС. Величина вводимой поправки согласно формуле 2.40 (П.А. Бакулев, «Радиолокация движущихся целей», Сов. радио, М., 1964 г., стр. 178) равна

где Vr - радиальная относительная скорость перемещения носителя РЛС и пассивных помех;
fo - несущая частота РЛС;
с - скорость света.
Этот блок предназначен для использования в одночастотных РЛС с фиксированным значением несущей частоты. Так как блок не позволяет учесть поправки на изменение несущей частоты РЛС, он не может быть использован в РЛС с перестройкой несущей частоты, а тем более в двухчастотных когерентно-импульсных РЛС с независимой перестройкой частотных каналов.
Наиболее близким по технической сущности к заявляемому объекту является устройство компенсации скорости в когерентно-импульсной РЛС по авт. св. СССР №1840875. Это устройство содержит счетно-решающий прибор, на входы которого поступает информация о собственной скорости носителя РЛС, азимуте и угле места, антенны РЛС, первый и второй перемножители, первые входы которых соединены с выходом счетно-решающего прибора, источник опорного напряжения, подключенный ко второму входу первого перемножителя, вычислитель поправки на изменение частоты, выход которого соединен со вторым входом второго перемножителя, сумматор, входы которого подключены к выходам перемножителей, а выход - к управляющему входу генератора частоты Допплера, выход которого соединен со входом смесителя, гетеродинный вход которого подключен к выходу когерентного гетеродина, а выход - к фильтру.
Такая совокупность признаков и связей позволяет вводить поправку в частоту опорного сигнала одночастотного радиолокатора с внутренней когерентностью для компенсации эффекта собственного движения. При этом обеспечивается автоматический ввод поправки при поимпульсном изменении несущей частоты радиолокатора.
Однако устройство компенсации скорости в когерентно-импульсной РЛС по авт. св. №1840875 не предназначено для использования в двухчастотных когерентно-импульсных РЛС и его применение в РЛС подобного типа затруднительно.
Это связано с тем, что, в зависимости от алгоритма обработки отраженных сигналов, в двухчастотных когерентно-импульсных РЛС возникают специфические особенности, процесса компенсации собственной скорости движения, которые будут рассмотрены ниже.
Как отмечается в литературе (см., например, В.М. Свистов, Радиолокационные сигналы и их обработка, Сов. радио, М., 1977 г., глава 8, § 8.1, Г.М. Вишин, Многочастотная радиолокация, Воениздат МО СССР, М., 1973 г., раздел II, § 3) достоинством двухчастотного метода, при котором РЛС одновременно излучает две последовательности когерентных радиоимпульсов с различными несущими частотами, а в приемнике используется разность допплеровских частот, является возможность работы без компенсации относительного движения пассивных помех под действием ветра и сил тяжести или относительного движения радиолокатора, если он установлен на платформе, перемещающейся с небольшой скоростью, например, на корабле. (При установке двухчастотной когерентно-импульсной РЛС на скоростном объекте, например, на самолете, для обеспечения работы системы селекции движущихся целей компенсация собственного движения обязательна).
Однако широкое применение средств радиопротиводействия привело к тому, что радиолокационные станции должны создаваться более устойчивыми по отношению как к пассивным, так и к активным помехам.
Одним из эффективных путей решения поставленной проблемы явилось создание двухчастотных когерентно-импульсных РЛС с аппаратурой для селекции движущихся целей, в которых применяется групповая электронная перестройка частоты излучаемых сигналов. Для повышения защищенности от воздействия активных помех частотные каналы перестраиваются независимо друг от друга и в широких пределах, ограничивающихся полосой пропускания применяемых электронно-вакуумных приборов и антенно-фидерного тракта.
При установке двухчастотной когерентно-импульсной РЛС с аппаратурой для селекции движущихся целей и независимой перестройкой частотных каналов на движущейся платформе, получаемая "удлиненная" скоростная характеристика системы селекции движущихся целей за счет использования двухчастотного метода не позволяет отказаться от устройства компенсации относительного движения, даже если платформа перемещается с небольшой скоростью (сравнимой со скоростью относительного перемещения пассивных помех). При независимой перестройке частотных каналов пассивные помехи могут иметь недопустимо большой разностный допплеровский сдвиг по частоте за счет увеличения разности излучаемых частот и будут выделяться схемой череспериодной компенсации, что ведет к существенному снижению качества подавления пассивных помех и ухудшению наблюдаемости движущихся целей.
Рассмотрим возникающие в двухчастотной когерентно-импульсной РЛС за счет перестройки частотных каналов и отсутствия компенсации относительного перемещения допплеровские сдвиги частоты от неподвижных пассивных помех, например, на работе третьего канала двухчастотной РЛС, описанной в патенте США №3382496 за 1967 г.
Допустим, РЛС излучает зондирующие сигналы на частотах fI и fII. Тогда сигналы, отраженные от неподвижных объектов при перемещающейся РЛС, будут иметь частоты:


где FдI, FдII - допплеровские сдвиги частоты сигналов, отраженных от неподвижных целей, возникающие за счет движения платформы, на частотах зондирующих сигналов первого fI и второго fII каналов соответственно;
Vr - радиальная скорость движения РЛС относительно неподвижной пассивной помехи.
После преобразования на промежуточную частоту выражения (2) и (3) примут вид:


где fпч - номинальное значение промежуточной частоты сигналов без учета допплеровских сдвигов;
fIпч, fIIпч - промежуточные частоты сигналов с учетом допплеровских сдвигов за счет собственного движения РЛС, соответственно на первой и второй частоте излучения.
Сигналы с частотами (4) и (5) далее перемножаются в фазовом детекторе и выделяется разностная допплеровская частота

Из формулы (6) видно, что разностная допплеровская частота сигналов, отраженных от помехи может быть сделана довольно малой за счет соответствующего выбора разноса частот fI и fII. При этом сигналы, отраженные от неподвижных пассивных помех при движущихся относительно них с небольшой скоростью радиолокаторе, будут подавлены.
Теперь предположим, что первый частотный канал может перестраиваться в пределах fIн÷fIв, а второй частотный канал - в пределах fIIн÷fIIв, причем между полосами перестройки частотных, каналов имеется минимально допустимый зазор fIн-fIIв. Здесь обозначены: fIн, fIIн - нижние точки частотных каналов, fIв, fIIв - верхние точки частотных каналов. В каждом частотном канале выберем фиксированные точки, на которых РЛС работает в обычном режиме (без перестройки несущей частоты). Пусть этими точками будут fIo и fIIo. При изменении частоты в первом частотном канале на ΔfI относительно fIo и изменении частоты во втором частотном канале на ΔfII относительно fIIо формула (6) принимает вид:
Т.о. в выражении для разностной допплеровской частоты появилась добавка
Теперь выражение для разностной допплеровской частоты можно записать следующим образом:
Из формулы (8) следует, что в зависимости от знака величины

 может иметь относительно Fp (формулы (7), (9)) знак "-" или "+". Это означает, что величина допплеровского сдвига частоты отражений от пассивных помех за счет движения радиолокатора постоянно меняется от
может иметь относительно Fp (формулы (7), (9)) знак "-" или "+". Это означает, что величина допплеровского сдвига частоты отражений от пассивных помех за счет движения радиолокатора постоянно меняется от  до
до  при перестройке рабочей частоты.
при перестройке рабочей частоты.
Увеличение допплеровского сдвига частоты отражений от пассивных помех  приводит к ухудшению их подавления селектором движущихся целей, т.е. достаточно большое увеличение разностной частоты вследствие перестройки частотных каналов может привести к тому, что сигналы от неподвижных объектов по своему виду станут похожи на сигналы от цели.
приводит к ухудшению их подавления селектором движущихся целей, т.е. достаточно большое увеличение разностной частоты вследствие перестройки частотных каналов может привести к тому, что сигналы от неподвижных объектов по своему виду станут похожи на сигналы от цели.
Выделение цели на фоне помех от неподвижных объектов будет затруднено.
Наоборот, с уменьшением
качество подавления отражений от пассивных помех возрастает, но при этом проявляется принципиальный недостаток двухчастотного метода селекции движущихся целей - сильно возрастают потери при выделении малоподвижных целей, например, вертолетов.
Простые вычисления по формуле (7) показывают, что даже в случае низких скоростей относительного перемещения пассивных помех и радиолокатора качество подавления отражений от пассивных помех в двухчастотной когерентно-импульсной РЛС существенно понижается и возможны потери медленно-движущихся целей, если в радиолокаторе применена независимая перестройка частотных каналов и отсутствует компенсация собственной скорости движения.
В двухчастотной РЛС с подавлением мешающих отражений, описанных, например, в патенте США №3382496 или в книге В.М. Свистова «Радиолокационные сигналы и их отработка», Сов. радио, М., 1977 г., стр. 372, рис. 8.1., возможна компенсация эффекта собственного движения с помощью устройства компенсации скорости в когерентно-импульсной РЛС по авт. свид. №1840875, но для этого требуется применение по крайней мере двух таких устройств, т.е. по одному на каждый канал.
При этом в двухчастотной РЛС, описанной в книге В.И. Свистова «Радиолокационные сигналы и их обработка», Сов. радио, М., 1977 г. стр. 372, рис. 8.1, отсутствует когерентный гетеродин и смесители и фильтры устройств компенсации могут быть включены либо между выводами генератора ГЗ и входами смесителей 4 и 6, либо между выходами смесителей 1 и 2 и входами смесителя 3.
Возможно также такое построение двухчастотных радиолокаторов, когда для обоих каналов применяется общий когерентный гетеродин, а эхо-сигналы объединяются на промежуточной частоте так, что частота суммарного сигнала определяется следующим выражением:

где fпч - номинальное значение промежуточной частоты.
Сигнал с такой частотой, полученный после объединения частотных каналов, перемножается в фазовом детекторе с напряжением когерентного гетеродина.
В построенном таким образом двухчастотном радиолокаторе с помощью двух устройств компенсации скорости в когерентно-импульсной РЛС по авт. св. №1840875 возможна компенсация эффекта собственного движения таким же образом, как и в рассмотренном выше двухчастотном радиолокаторе по книге В.М. Свистова «Радиолокационные сигналы и их обработка», Сов. радио., М., 1977 г., стр. 372, рис. 8.1.
Однако устройство компенсации скорости в когерентно-импульсной РЛС по авт. свид. №1840875 представляет собой сложный дорогостоящий прибор, имеющий определенные габариты и массу.
Применение двух таких устройств для компенсации эффекта собственного движения в двухчастотной когерентно-импульсной РЛС не всегда приемлемо, а в отдельных случаях, если к радиолокатору предъявляются жесткие требования в отношении массы и габаритов (например, если двухчастотный радиолокатор требуется установить на самолете или вертолете), практически невозможно.
Целью настоящего изобретения является устранение указанных выше недостатков и повышение качества подавления пассивных помех в двухчастотном когерентно-импульсном радиолокаторе с независимой перестройкой частотных каналов, установленном на движущейся платформе, при минимальных затратах на аппаратуру компенсации.
Поставленная цель достигается тем, что в устройство компенсации скорости в когерентно-импульсной РЛС, содержащем первый и второй перемножители, счетно-решающий прибор, входы которого подключены к первым входам первого и второго перемножителей, источник опорного напряжения, соединенный со вторым входом первого перемножителя, вычислитель поправки на изменение частоты, выход которого подключен ко второму входу второго перемножителя, сумматор, один из входов которого соединен с выходом первого перемножителя, генератор частоты Допплера, управляющий вход которого подключен к выходу сумматора, когерентный гетеродин, фильтр и сместитель, входы которого соединены с выходами генератора частоты Допплера и когерентного гетеродина, а выход - с фильтром, дополнительно введены третий перемножитель, первый вход которого соединен с выходом счетно-решающего прибора, второй вычислитель поправки на изменение частоты, выход которого подключен ко второму входу третьего перемножителя, и вычитающее устройство, входы которого соединены с выходами второго и третьего перемножителей, а выход - с одним из входов сумматора.
На фиг. 1 приведена блок-схема предлагаемого устройства компенсации скорости в когерентно-импульсной РЛС.
Это устройство содержит счетно-решающий прибор 1, первый перемножитель 2, источник опорного напряжения 3, вычислитель направки на изменение частоты 4, сумматор 5, генератор частоты Допплера 6, второй перемножитель 7, вычитающее устройство 8, смеситель 9, фильтр 10, третий перемножитель 11, когерентный гетеродин 12, вычислитель поправки на изменение частоты 13.
Путем специального формирования управляющего напряжения для генератора частоты Допплера 6 устройство позволяет ввести поправку в частоту когерентного гетеродина 12 согласно формуле (7), компенсирующую эффект собственного движения двухчастотного радиолокатора с независимой перестройкой частотных каналов.
При поступлении на вход счетно-решающего прибора 1 информации о путевой скорости носителя радиолокатора, азимуте и угле места антенны радиолокатора он вырабатывает напряжение U1 (с соответствующим знаком), пропорциональное радиальной скорости Vr движения радиолокатора относительно неподвижных пассивных помех. Напряжение U1 подается на первые входы первого 2, второго 7 и третьего 11 перемножителей.
В первом перемножителе 2 напряжение U1, пропорциональное радиальной скорости Vr, умножается на постоянное напряжение источника опорного напряжения 3 U2, пропорциональное величине
и формируется напряжение U3, пропорциональное величине
Вычислитель поправки на изменение частоты 4, который может представлять собой, например, частотный дискриминатор, на который может подаваться напряжение с гетеродина первого частотного канала, формирует напряжение U4, пропорциональное
Напряжение U4 во втором перемножителе 7 умножается на напряжение U1 и формируется напряжение U5, пропорциональное
Вычислитель поправки на изменение частоты 13 формирует напряжение U6, пропорциональное
В третьем перемножителе 11 перемножаются напряжения U1 и U6 и формируется напряжение U7, пропорциональное
В вычитающем устройстве 8 из напряжений U5 и U7 формируется напряжение U8, пропорциональное
После суммирования напряжений U3 и U8 в сумматоре 5 на его выходе появляется напряжение U9, пропорциональное

которое используется для управления частотой генератора частоты Допплера 6. Как видно, выражение (19) полностью соответствует формуле (7), т.е. пропорционально величине частоты, которую необходимо компенсировать.
Масштаб напряжений U1, U2, U4, U6 выбирается с учетом требуемой величины смещения частоты генератора частоты Допплера 6 (в зависимости от диапазона частот зондирующих сигналов и крутизны перестройки генератора частоты Допплера (6).
В реальных радиолокаторах обычно за начальные рабочие точки выбираются частоты fIн и fIIн, тогда величины ΔfI и ΔfII при перестройке частоты относительно fIн и fIIн будут всегда положительны, что упрощает вычисление добавки (8).
В смесителе 9 смешиваются колебания когерентного гетеродина 12 и генератора частоты Допплера 6, после чего фильтром 10 выделяется верхняя или нижняя составляющая ( или
или  ) в зависимости от знака радиальной скорости Vr.
) в зависимости от знака радиальной скорости Vr.
Нетрудно убедиться, что предлагаемое устройство компенсации скорости в когерентно-импульсной РЛС может быть применено и в двухчастотной РЛС, в которой отсутствует когерентный гетеродин, например, в РЛС, описанной в книге В.М. Свистова «Радиолокационные сигналы и их обработка», Сов. радио, М., 1977 г., стр. 372, рис. 8.1.
Для этого достаточно включить смеситель 9 и фильтр 10 устройства, например, между выходом смесителя 1 и входом смесителя 3, т.е. только в один частотный канал (смесители 1 и 3 относятся к рис. 8.1 вышеупомянутой книги).
Действительно, пусть в первом канале частота отраженных от неподвижных объектов сигналов будет
а во втором -
(Здесь для простоты радиальная скорость Vr выбрана со знаком "+").
При этом значение частоты генератора частоты Допплера 6 будет

В смесителе устройства 9 сигналы с частотой (20) с выхода первого частотного канала перемножаются с сигналом генератора частоты Допплера, 6, частота которого определяется выражением (22).
При этом фильтр 10 должен выделить нижнюю боковую частоту. Т.о. частота сигнала на выходе фильтра 10 будет

Далее в схеме радиолокатора сигналы с такой частотой перемножаются с сигналами второго частотного канала (21). Результирующая частота сигналов, отраженных от неподвижных пассивных помех, будет равна нулю (выражения (21) и (23) совпадают).
Таким образом, допплеровский сдвиг частоты отражений от неподвижных объектов при движущемся радиолокаторе благодаря применению предлагаемого устройства компенсации скорости полностью устранен, что приводит к повышению качества подавления пассивных помех.
Предлагаемое устройство компенсации скорости в когерентно-импульсной РЛС универсально и может применяться также в одноканальных РЛС, для чего достаточно изменить величину напряжения источника опорного напряжения 3 так, чтобы оно было пропорционально  , где fo - несущая, частота радиолокатора, а второй вычислитель поправки на изменение частоты 13 и третий перемножитель 11 не использовать.
, где fo - несущая, частота радиолокатора, а второй вычислитель поправки на изменение частоты 13 и третий перемножитель 11 не использовать.
В предлагаемом устройстве компенсации скорости в когерентно-импульсной РЛС схема ввода частоты компенсации (генератор частоты Допплера 6, смеситель 9 и фильтр 10) упрощена. В принципе она может быть выполнена по схеме, описанной в книге М.И. Финкельштейна «Основы радиолокации», Сов. радио, М., 1973 г., стр. 353, рис. 6.11.1.
Применение предлагаемого устройства при построении двухчастотных когерентно-импульсных РЛС с независимой перестройкой частотных каналов, предназначенных для установки на движущихся объектах, при снижении в 1,5-2 раза веса и габаритов и минимальных затратах на аппаратуру компенсации позволяет существенно облегчить селекцию движущихся целей, повысить качество подавления отражений от пассивных помех при одновременной независимой перестройке частотных каналов, что существенно повышает помехозащищенность радиолокационной станции в условиях воздействия комбинированных (активные плюс пассивные) помех.
Устройство компенсации скорости в когерентно-импульсной радиолокационной станции, содержащее последовательно соединенные счетно-решающий блок, первый перемножитель, ко второму входу которого подключен источник опорного напряжения, сумматор, генератор частоты Допплера, смеситель с подключенным ко второму входу когерентным гетеродином и фильтр, а также второй перемножитель, первый вход которого подключен ко второму выходу счетно-решающего блока, а второй вход подключен к выходу вычислителя поправки к частоте, отличающееся тем, что, с целью улучшения степени подавления пассивных помех при компенсации скорости в двухчастотной когерентно-импульсной радиолокационной станции с независимой перестройкой частотных каналов, введены третий перемножитель, второй вычислитель поправки к частоте и вычитатель, при этом выход вычитателя подключен ко второму входу сумматора, первый вход вычитателя подключен к выходу второго перемножителя, второй вход вычитателя подключен к выходу третьего перемножителя, первый вход которого подключен ко второму выходу счетно-решающего блока, а второй вход подключен к выходу второго вычислителя поправки к частоте.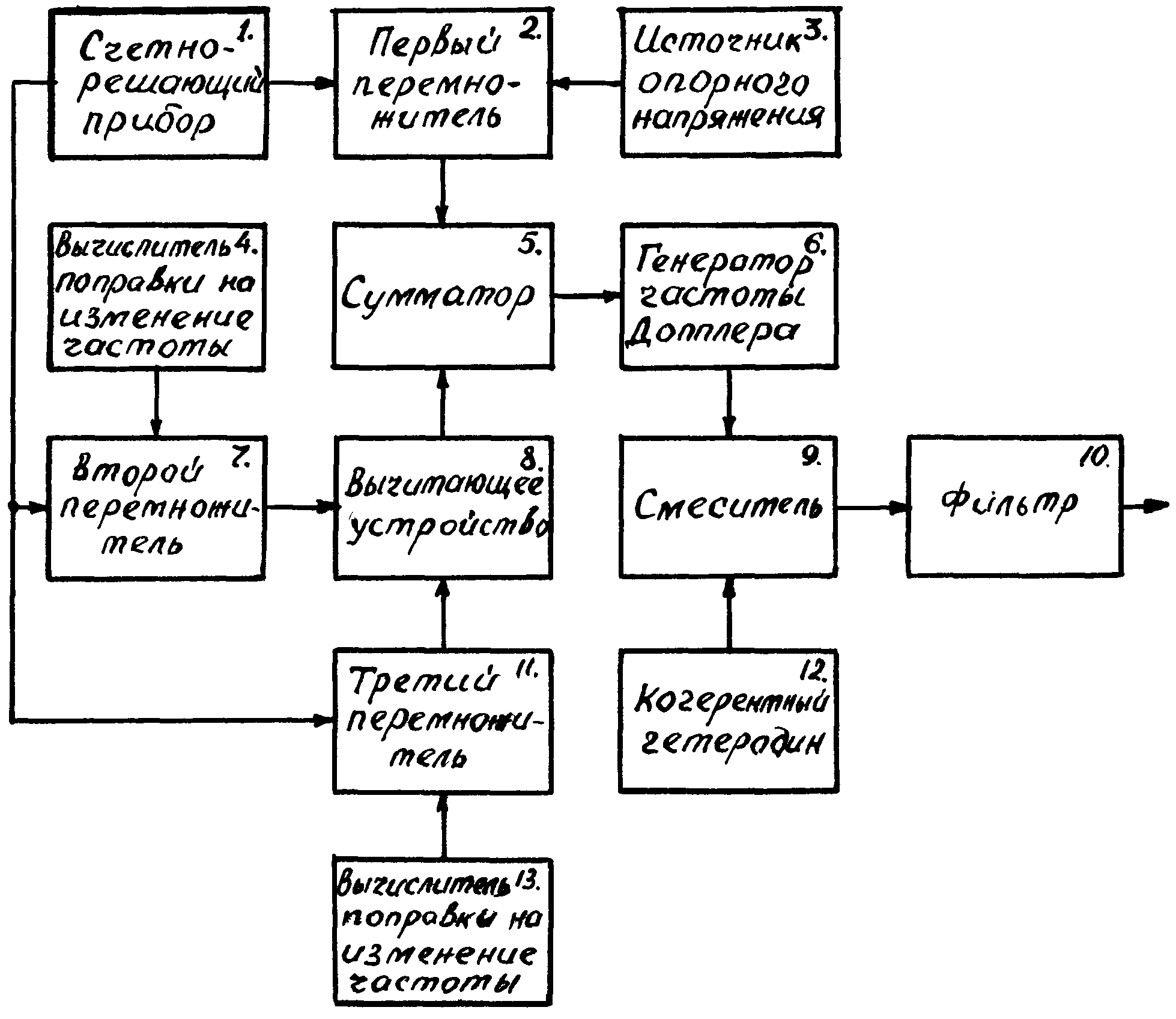
Имитатор угла поворота антенны рлс
Импульсный когерентный радиолокатор
Передающий тракт радиолокатора кругового обзора
Цифровой когерентный фильтр
Устройство компенсации скорости в когерентно-импульсной радиолокационной станции
Устройство селекции движущихся целей
Импульсный когерентный радиолокатор

